

温馨提示:本专栏内容主要以西北工业大学出版社.《航天飞行动力学》为主,只是用以帮助简单地了解、梳理飞行力学的相关知识。本节重点整理可直接跳转至文章末尾。内容会涉及一些本人在学习过程中的思考与观点,由于水平有限,难免存在疏漏错误之处,敬请批评指正。未经允许禁止转载。
本节的知识体系框架如下所示:
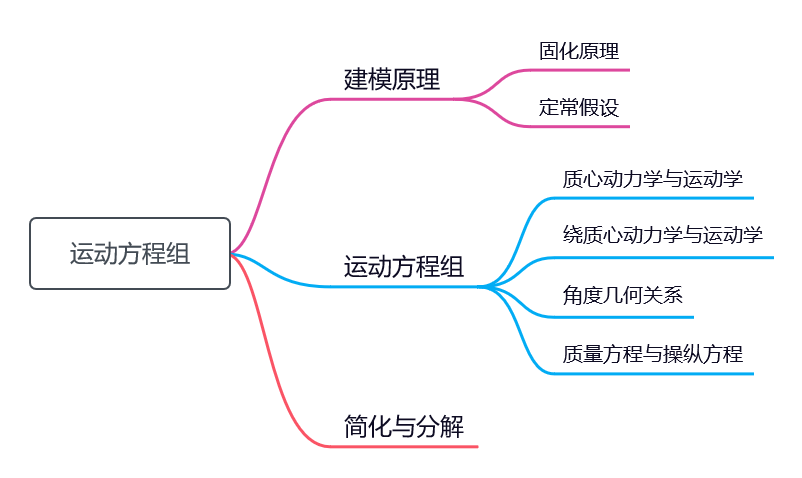
运动方程组知识框架
1.3.1建模原理
由理论力学的知识可知,刚体在空间中的任意运动可以分解为质心的平移运动以及绕质心的旋转运动,可由六个参数描述:质心瞬时平动的三自由度以及绕质心瞬时转动的三自由度。描述刚体平动与转动的基本动力学方程为:
其中m为刚体质量、V为刚体质心的瞬时速度、F为合外力;H为刚体瞬时转动的动量矩、M为对质心的合外力矩。
刚体动力学方程的基本条件为:(1)常质量;(2)惯性系。
在飞行器的飞行过程中,控制系统、机械部件与飞行器之间很有可能出现相对运动;大多数有动力飞行器也存在燃料不断消耗的情况。若想对飞行器的运动进行精确的建模分析则需要采用变质量力学定理,这会使问题复杂化很多。因此,在设计初期,可以将飞行器与喷射的燃气质量合在一起考虑,转换为一个常质量系。在进行任意瞬时的研究时,将变质量系的飞行器视为一个虚拟刚体,把瞬时飞行器所包含的所有物质固化在虚拟的刚体上,忽略影响运动的次要因素,这样的假设称为固化原理。
固化原理也称为刚化原理,但这与理论力学中的刚化原理有所差异。此处所说的固化原理是为了研究飞行器的运动时忽略次要的影响因素,飞行器自身并未保持平衡。实际飞行过程中不可避免的会产生气动弹性力、哥式惯性力、附加变分力等干扰。
此外,我们认为作用于飞行器上的各种外力仅取决于飞行器在当前瞬时的运动状态与参数,忽略如非定常流场、非定常内弹道、非定常质量变化等非定常物理场所引起的作用,这种假设称为“定常假设”。与上一节飞行力学知识梳理·力学环境(有翼飞行器飞行力学)中所提及的空气作用的定常假设相同。
1.3.2飞行器运动方程组
飞行器运动方程组是描述作用的力、力矩与运动参数之间关系的一组方程。按照运动的分解可以分为质心动力学方程、质心运动学方程、绕质心动力学方程、绕质心运动学方程、角度几何关系方程、质量变化方程以及操纵关系方程7类。这其中包含有微分方程也包含有非微分方程。本节中先给出运动方程组的推导,在后续将专门介绍如何使用数值方法求解运动方程组。
1.3.2.1质心动力学方程
在惯性系下描述质心运动时,动力学关系已在上述提及。但为更明确地表现出速度大小与方向的变化,研究质心动力学时我们会将矢量方程投影在弹道坐标系下。由于弹道坐标系随着飞行器的运动不断发生改变,因此在动坐标系中建立动力学方程时需要引入绝对导数与相对导数之间的关系:
(该方程在理论力学中应已经给出证明,此处不赘述)
其中将叉乘项展开可得:
为惯性系下运动的绝对导数,
为动坐标系(此处是弹道坐标系)下运动的相对导数,
为动坐标系相对于惯性系的转动角速度矢量。
依据弹道坐标系的定义,速度矢量及其相对导数满足:
弹道坐标系相对于惯性空间的旋转可以通过弹道倾角与弹道偏角的旋转角速度来描述。在弹道坐标系下观测时,弹道倾角直接绕着弹道坐标系z轴旋转,因此其旋转矢量在弹道坐标系下分量为
。弹道偏角是绕着过渡坐标系的y轴旋转,在过渡坐标系下的旋转矢量为
,变换到弹道坐标系时需要进行一次关于z轴的变换,因此其在弹道坐标系下的投影为
,
综上所述,弹道坐标系的旋转角速度矢量为:
联立上述公式,方程左边可展开为:
方程左边处理完毕后,需要将方程右边——所受合外力也转换至弹道坐标系下,以下给出几种典型外力:气动力、推力、重力的转换方法:
(注:在坐标变换矩阵中,下标B表示弹体系(body);下标T表示弹道系(track);
下标G表示地面系(ground);下标V表示速度系(velocity))
气动力气动力在速度坐标系下描述,因此首先给出速度系到弹道系的变换矩阵为:气动力矢量投影在弹道系的矢量为:
推力推力在弹体坐标系下描述,弹体系到弹道系的变换矩阵为:此处将推力方向简化为沿飞行器纵轴指向质心,因此推力在弹道系下的矢量为:
重力重力在地面系下描述,地面系到弹道系的坐标变换矩阵为:将重力简化为指向地心的常值平行力场,重力在弹道系下的分量为:
结合上述公式推导,可以给出弹道坐标系下的质心动力学方程为:
1.3.2.2质心运动学方程
地面系位置坐标的绝对导数即为地面系下的速度分量,依据地面系与弹道系的变换关系,飞行器的质心运动学方程如下:
1.3.2.3绕质心动力学方程
由于合外力矩一般在弹体下较为方便描述,因此在弹体系下建立绕质心动力学方程。弹体系与弹道系相同,为动坐标系,因此首先引入转动动力学的相对关系:
(该方程在理论力学中应已经给出证明,此处不赘述)
其中,惯性张量矩阵J以及动量矩H的定义如下:
注:对于绝大多数飞行器至少具有面对称特性,因此。
将动坐标系下的转动动力学展开,可以得到弹体系下的转动动力学方程为:
(注:书上的公式存在错误,此处是正确的)
将其化为微分方程形式,可以得到面对称飞行器的绕质心动力学方程为:
对于轴对称飞行器,则可以进一步将xy方向的惯性张量简化,得到微分方程为:
一般我们会将其他方向的转动角速度与转动惯量所引起的力矩称为惯性交感力矩,关于惯性交感力矩的成因将在后续的介绍中提及。
由于航天飞行器大多为轴对称飞行器,因此后续的运动方程组推导中我们将采用简化的轴对称方程进行推导。
1.3.2.4绕质心运动学方程
飞行器纵轴的绕质心运动可以由三个姿态角的旋转角速度来描述。滚转角速度的旋转矢量与弹体坐标系的x轴重合;俯仰角速度的旋转矢量与过渡坐标系2的z轴重合,即需要进行一次关于滚转角的旋转变换;偏航角速度的旋转矢量与过渡坐标系1的y轴重合,即需要进行关于滚转角与俯仰角的变换。综上所述,弹体坐标系下,飞行器所表现出的转动角速度与姿态角角速度之间的关系如下:
进行矩阵变换,可以得到姿态角速度与弹体坐标系下的旋转角速度之间的微分方程为:
逆矩阵可以通过线性代数中的初等变换得到,具体的推导过程如下:
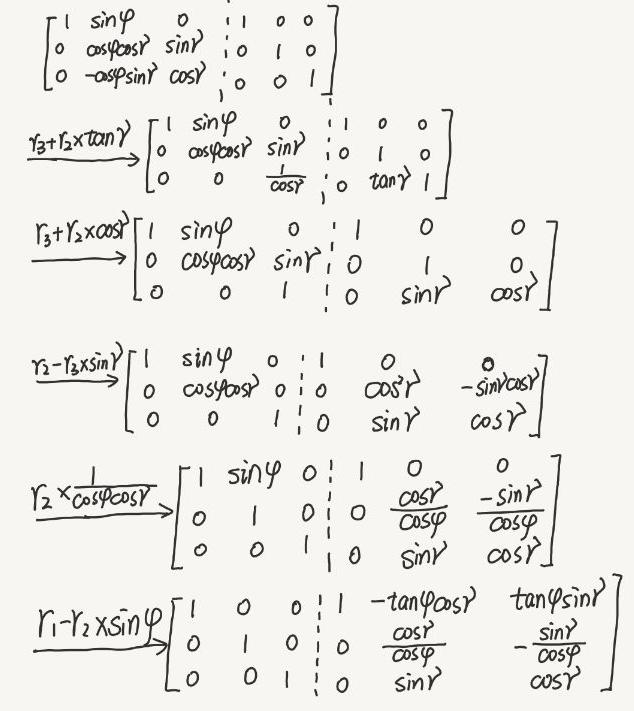
姿态旋转矩阵逆矩阵的推导过程
由此可以得到飞行器的绕质心运动学方程。
1.3.2.5角度几何关系方程
在坐标系定义与变换一节中,我们介绍了四个常用的坐标系,在研究它们的变换关系时,我们定义了8个角度,如下图所示:·
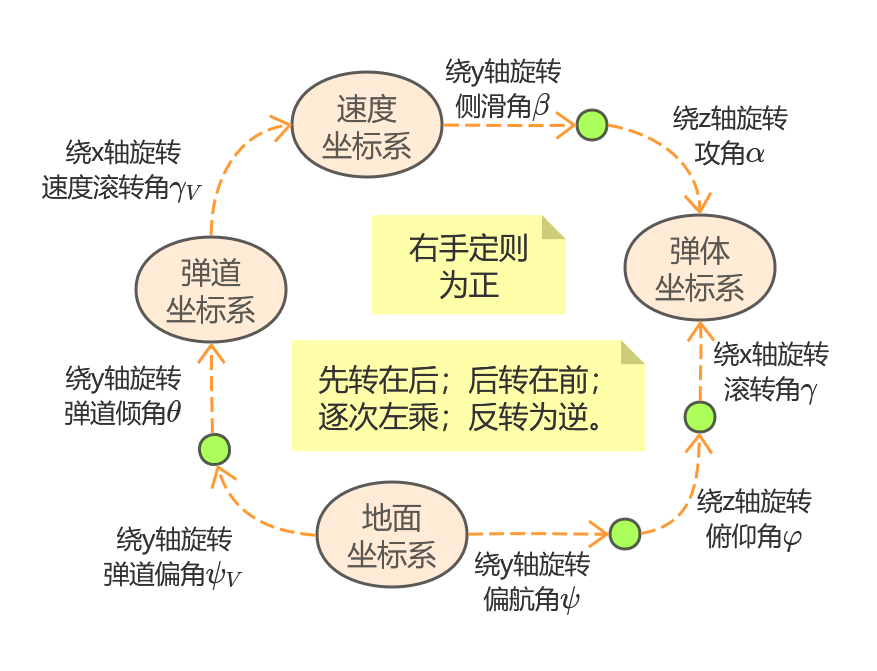
根据上图我们可以发现,由于地面系变换到弹体系的方式并不是唯一的,这8个角度参数之间并不是完全独立,若确定了其中5个,可以依据角度的几何关系推导出剩下3个。在上述介绍中,我们已经建立了姿态角以及速度角的微分方程,因此我们认为姿态角与速度角是已知量,需要求解气动角以及速度倾斜角的几何关系。下面以侧滑角的推导为例,介绍角度角度几何关系方程的推导方法:
根据坐标变换矩阵,速度系到弹体系的变换关系为:
轴在速度系下的坐标矢量为
;
依据坐标变换关系,轴在弹体系下的坐标矢量为:
两轴的方向余弦(向量点积)为:
弹道系到地面系的变换矩阵关系为:
弹体系到地面系的变换矩阵关系为:
则依据变换关系,轴在地面坐标系下的坐标矢量为:
两轴的方向余弦为:
根据坐标系的定义,轴均沿着速度矢量的方向,二者完全重合,因此依据
可以得到侧滑角的几何关系为:
同理,依据轴之间的方向余弦关系,可以推导出攻角的几何关系方程为:
依据轴之间的方向余弦关系,可以推导出速度滚转角的几何关系方程为:
1.3.2.6质量变化方程以及操纵关系方程
质量变化方程是描述有动力飞行器随着燃料消耗质量发生改变的数学语言,即:
其中为总燃料(燃料、氧化剂等所有组分)的质量流率。
操纵关系方程是表征飞行器控制的状态方程,对于大多数飞行器而言,表征为三通道的气动舵以及发动机推力大小的控制,即:
操纵关系一般由制导控制系统实时给出,是一个基于当前飞行状态以及飞行任务所确定的状态。不同的飞行器、不同的飞行任务、不同的飞行状态均有不同的操纵关系,但总之,在操纵关系方程下,所有的方程可以组合为一个闭合的方程组,可以对其中的量进行求解。
1.3.2.7运动方程组
将上述20个方程联立在一起,可以得到以标量形式建立的飞行器空间运动方程组,它是一组非线性常微分方程。
方程中除了外力与外力矩依据运动状态和飞行器总体参数进行解算外,其余时变参数在给出初始值后,均可以通过数值积分的方法进行求解。
1.3.3运动方程组的简化与分解
上文给出了用20个方程描述飞行器运动的运动微分方程组,实际上在工程中描述飞行器运动的参数远不止这些。使用的参数越多,描述地就越准确、越详细,但相对地研究与求解就越复杂。在飞行器设计的初步阶段,没有必要进行这么详细地建模。在精度允许地范围内,可以将飞行器的运动进行适当的简化与分析。
下面介绍将飞行器的运动方程组分为铅锤面的运动方程组和水平面的运动方程组的简化方法。
纵向运动是由飞行器质心在纵平面内的运动以及绕着轴的旋转运动组成的;侧向运动是由飞行器质心偏离纵平面的平动以及绕着
轴的旋转运动组成的。为了能独立求解纵向运动参数,我们总是需要通过一定的简化方法将运动方程组中的侧向运动参数分离出去,实践表明,满足以下条件:
侧向运动参数均为小量,侧向运动参数对纵向运动影响很小;
飞行器基本在某个铅锤面内飞行,飞行弹道与铅锤面弹道差异不大;
俯仰通道控制系统仅取决于纵向运动参数,滚转与偏航通道控制系统仅取决于侧向运动参数。
因此可以得到纵向运动方程组如下:
相对地,侧向运动方程组为:
可以发现的是,纵向运动参数与侧向运动参数无关,但侧向运动会取决于纵向运动参数。在我们进行弹道求解中,我们用20个方程的全量方程即可,但分解简化的运动方程在制导控制系统设计过程中有很大的参考价值,在后续动态特性分析内容中我们会详细介绍。
总结
运动方程组的建模假设:定常假设、固化原理。
固化原理:在进行任意瞬时的研究时,将变质量系的飞行器视为一个虚拟刚体,把瞬时飞行器所包含的所有物质固化在虚拟的刚体上,忽略影响运动的次要因素,这样的假设称为固化原理。
定常假设:作用于飞行器上的各种外力仅取决于飞行器在当前瞬时的运动状态与参数,这种假设称为“定常假设”。
运动方程组的简化假设:
侧向运动参数均为小量,侧向运动参数对纵向运动影响很小;
飞行器基本在某个铅锤面内飞行,飞行弹道与铅锤面弹道差异不大;
俯仰通道控制系统仅取决于纵向运动参数,滚转与偏航通道控制系统仅取决于侧向运动参数。
下一节:1.4有翼飞行器飞行力学·质心运动与过载
