技术分享 | 详解ROS 2的安装步骤

在上一期呢,我们把ROS 1 与ROS 2做了对比,承优淘劣的ROS 2系统在应用和性能上只会比ROS 1更加强大,因此ROS的全面迭代也是不可避免的。
本期就尝试一下安装ROS2吧。
1. ROS2安装
1)安装环境
本文基于Ubuntu20.04.3安装ROS2 Foxy
2)安装方式
ROS提供两种方式安装,一是二进制安装,(二进制又分为 Debian packages 和 "fat" archive两种方式),二是源码安装。这里采用二进制方式安装(Debian packages)
3)设置软件源
4)安装ROS2
5)环境设置
安装完成后
2. ROS2测试
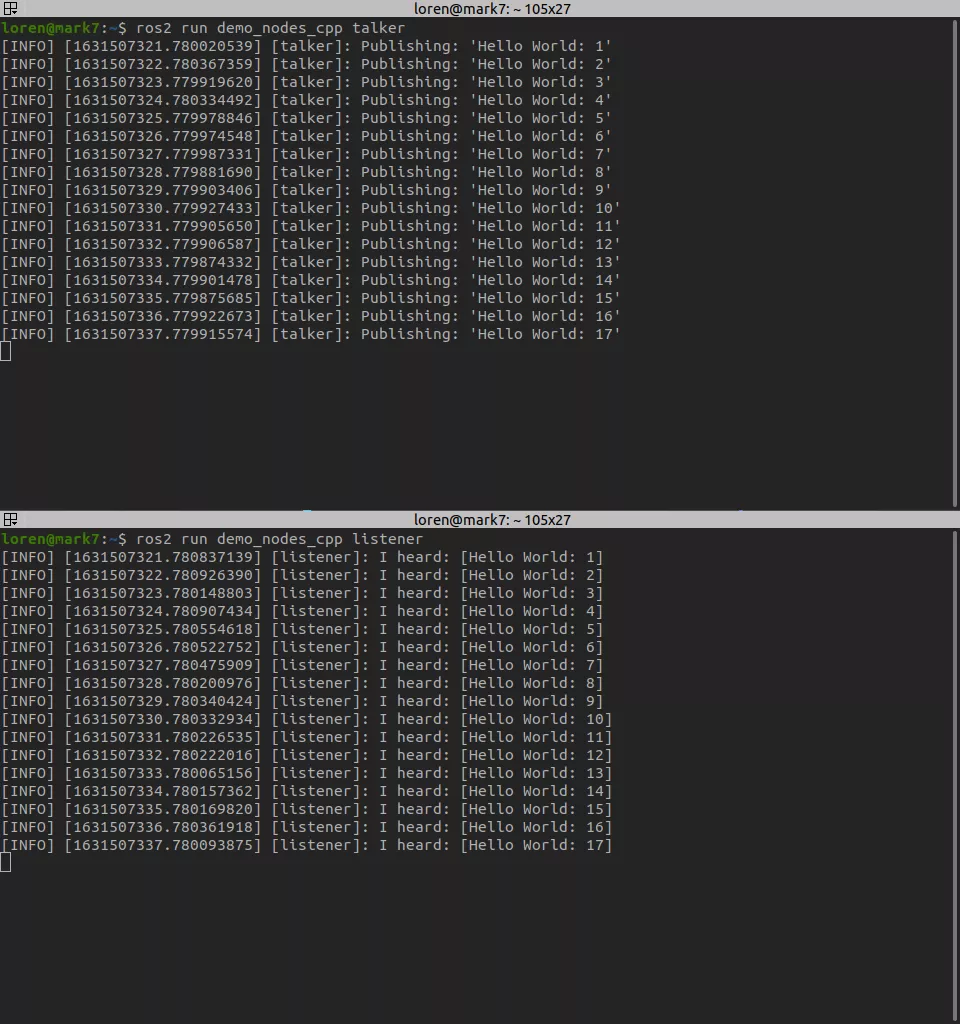
打开终端,输入
ros2 run demo_nodes_cpp talker
新开一个终端,输入
ros2 run demo_nodes_cpp listener
验证结果
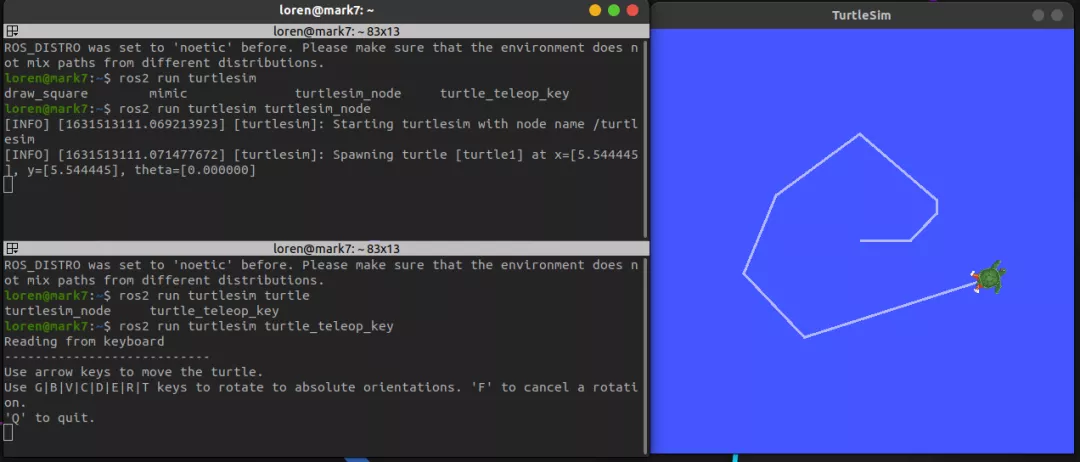
当然也可以选择最经典的小乌龟来进行测试
打开终端,输入
ros2 run turtlesim turtlesim_node
证结果
3、结语
自2007年开始,ROS的出现,随着后续的发展,打破了机器人行业标准,建立了一套全新的机器人通信标准,解决了机器人各个部分的通信问题。随着时代的发展,ROS1也暴露出诸多不足。因此ROS2的出现是必然的。ROS2继承了ROS1的优秀之处,同时解决了ROS1遗留的诸多难题。ROS2的诞生至今已经6年,未来可期!
作者:阿木工程师-青石
- End -
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术。
本文为我原创,未经授权禁止转载
cv13293626
分享至
投诉或建议
