下面就三部分来介绍Allan方差
Allan方差的计算方法
Allan方差可辨别出的噪声
Allan方差的应用
Allan方差的计算方法
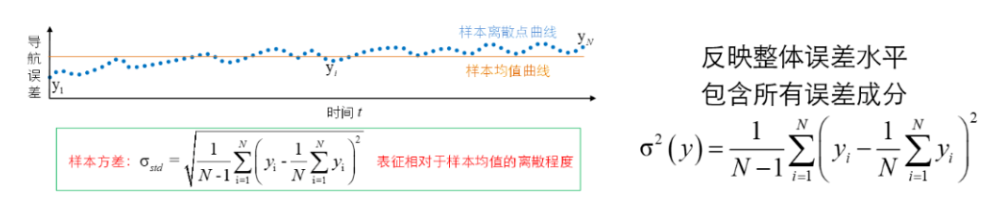
Allan方差是时频分析和惯性导航领域常用的一种误差分析方法,它有效的刻画了待研究误差时间序列在不同时间尺度上的波动水平,并可根据不同时间尺度上的Allan方差值所构成的曲线的形状特征来辨识其中包含的随机过程模型,非常适合对中长期波动进行定量描述和分析。与Allan方差相比,传统的误差指标往往是采用误差均值(反映整个误差序列有无宏观偏置)、标准差(反映整个误差序列的波动情况)。如下图所示,他们都是反映误差序列的整体情况的指标,其中包含有快速变化和长时间缓慢变化的各个成分,无法细分出不同的时间尺度上的误差波动情况。
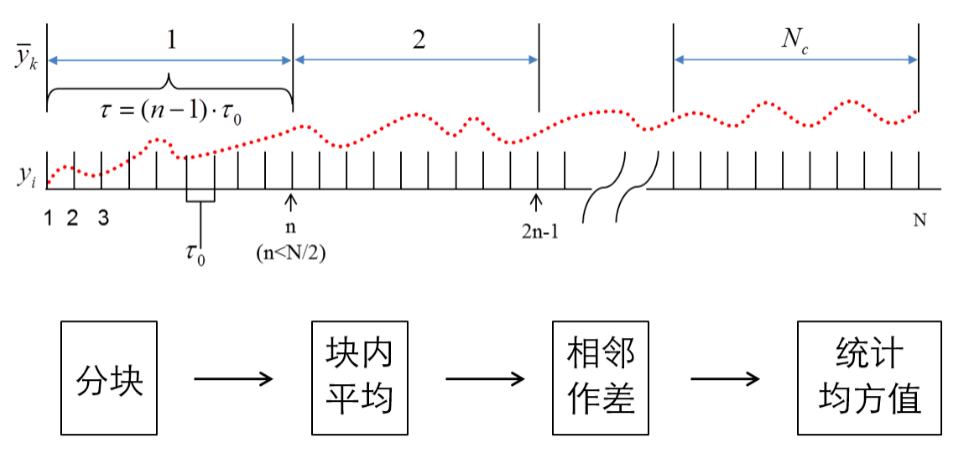
Allan方差则是将误差序列在某个指定的时间尺度上的波动情况进行了精确提取,计算步骤如下:
将整段误差序列按照你感兴趣的时间尺度的长度(例如10s)进行分块
每块求平均值
相邻块的平均值求差
将所有的差值进行统计,得到其均方值(E(x2)),并乘以1/2
这样就得到了对应于这个块长度(10s)的Allan方差值,具体过程如下图:
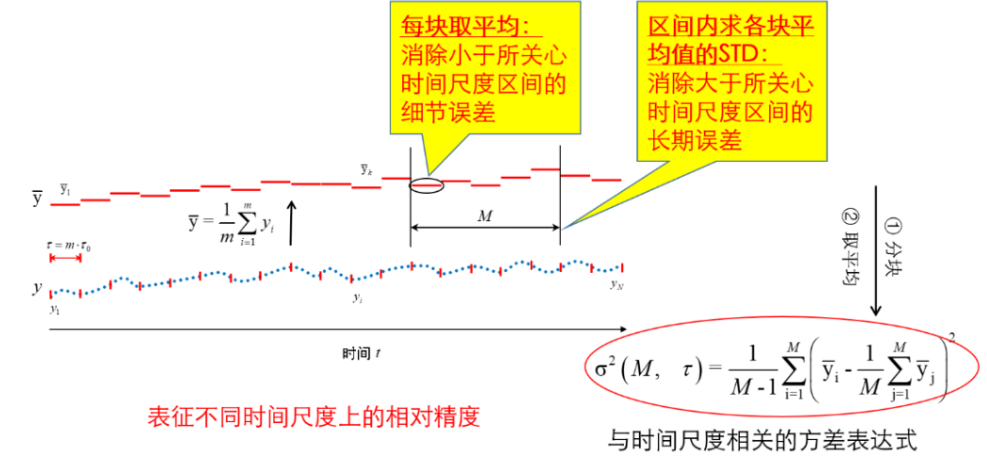
那么Allan方差是怎样来将对误差序列的分析限制在某个指定的时间尺度上的呢?如果我们只对某一时间尺度上的误差波动感兴趣的话,那么比这个时间尺度更小的细节变化(短时间快速跳动)和比这个时间尺度更大的宏观变化(长时间缓慢漂移)就都不关心了,希望在我们的误差指标中都被消除掉。详细解释如下:
通过分块确定所要考察的时间块长度
利用块内求平均的方法把短于块长度的那些快速变化(细节)都抹掉
再利用相邻块求差的办法把长于两块长度的那些缓慢变化(宏观)去除掉
最后对差值序列统计其均方值,这样统计出来的就是介于1倍块长度和2倍块长度的一个很窄的时间尺度范围内的误差波动情况
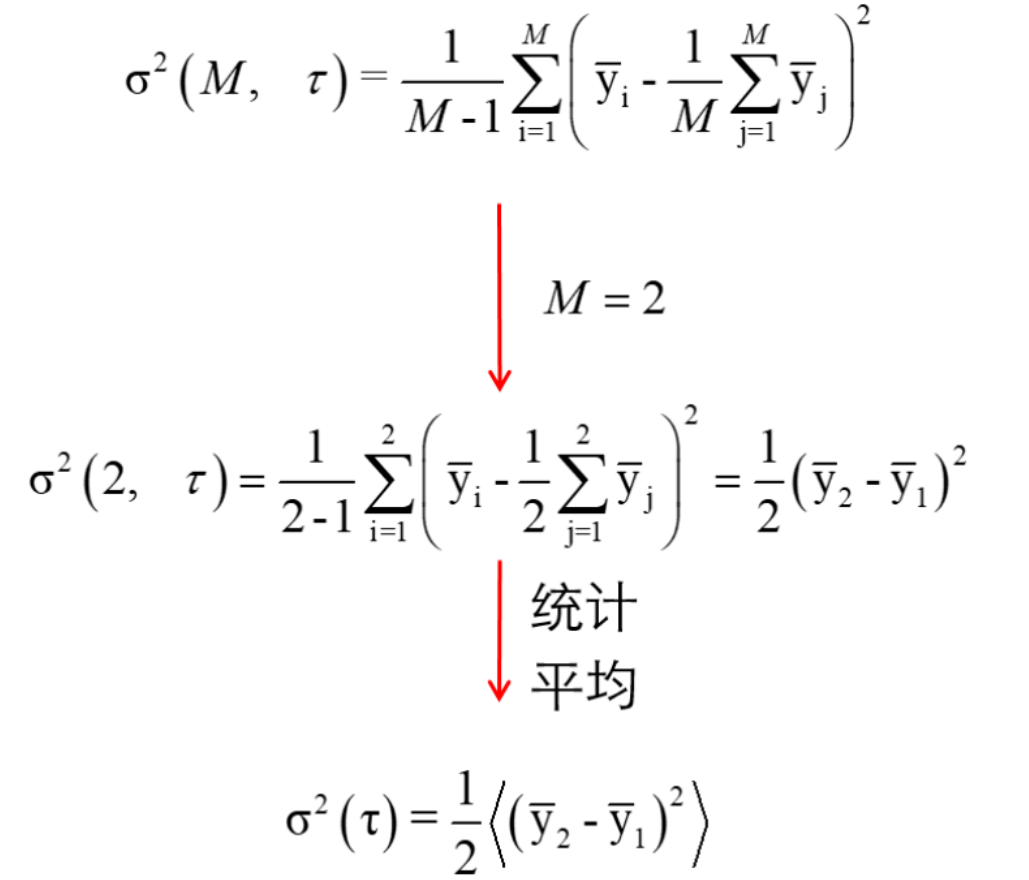
前文提到了,对应于某个块长度的Allan方差反映的是1~2倍块长度这一狭窄时间尺度范围内的误差,那么如何反映1~M倍块长度范围内的误差呢?这就涉及到一种更通用的样本方差分析方法。
如下图所示,通用的样本方差分析和Allan方差的区别在于分块、取平均之后,不是采取相邻块求差,而是截取连续M块求其标准方差,然后统计这些方差的样本均值,作为反映1~M倍块长度这个时间尺度区间内的误差指标。这样就可以灵活地提取和评估我们所关心的任何时间尺度范围内的误差成分!
容易推导,Allan方差只是上述通用样本方差分析在M=2时的一个特例:
如果我们对误差序列的各个时间尺度上的成分都感兴趣的话,可以将块长度由短到长,“扫描”一遍,得到一组Allan方差值,然后画出“Allan方差 vs 块长度”的曲线,就可以全面的反映被研究的误差序列的特性了。
如果类比于经典方差,严格意义上应该称σ(τ)为Allan 标准差,但习惯上常常直接称σ(τ)为Allan 方差。
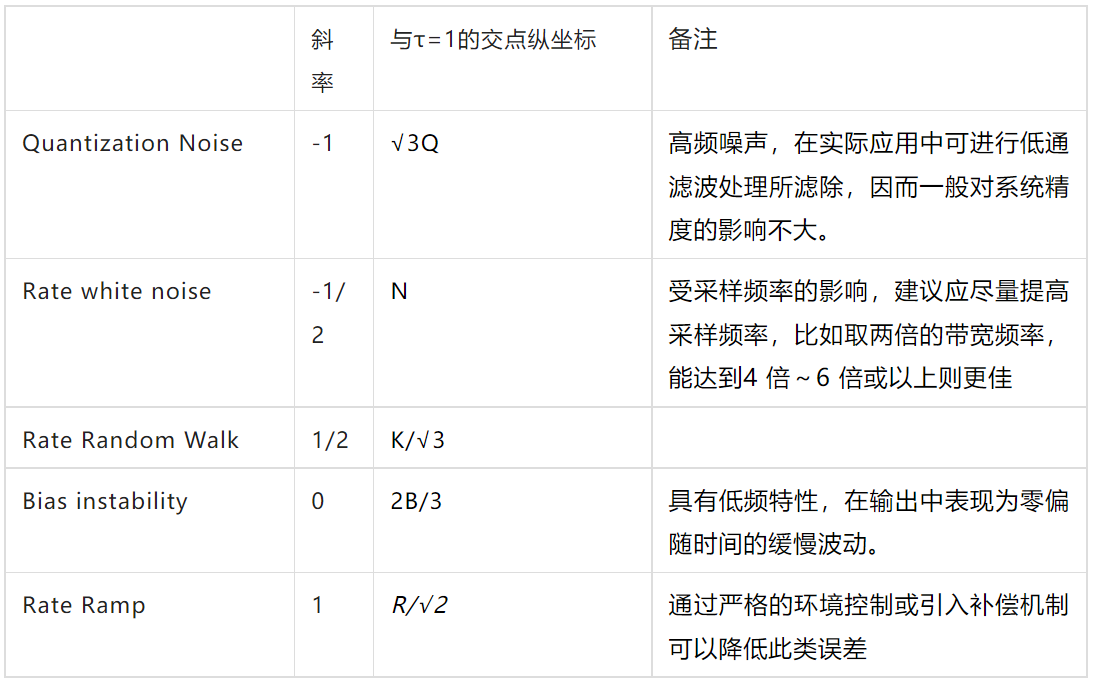
2. Allan方差可辨别出的噪声
量化噪声(Quantization Noise, QN)
Rate white noise
Rate Random Walk
零偏不稳定噪声(Bias instability)
速率斜坡 (Rate Ramp)
2.1量化噪声(Quantization Noise, QN)
进行数字量化编码采样时,传感器输出的理想值与量化值之间就必然会有微小的差别。量化噪声代表了传感器检测的最小分辨率水平。 以角增量输出陀螺仪为例来说明角度量化噪声,假设量化当量为Δ,采样频率
对于“四舍五入”型量化噪声,常常视其为服从均匀分布的零均值白噪声, 并且易知其方差( 或平均功率)为 ,ΔΔ/12 该白噪声的功率谱在,根据信号时域方差与频域功率谱积分面积相等原则,得角度量化噪声的功率谱密度为:
式中:量化噪声系数为Q
根据随机微分公式,得角速率的功率谱为

得到角速率量化噪声的Allan方差为

实际计算Allan 方差时,由于采样序列的离散化和有限长N 点的特点,导致角速率功率谱的最低频率和最高频率是有限的,即
当N 比较大时可近似为
因此,若令x=πfτ ,角速率量化噪声的Allan方差可改写为

由离散序列计算Allan方差,通常取平均时间(数据分组时间或简称簇时间)为
τ=Mτ0
甚至为

此时
所以Allan方差进一步可简化成:


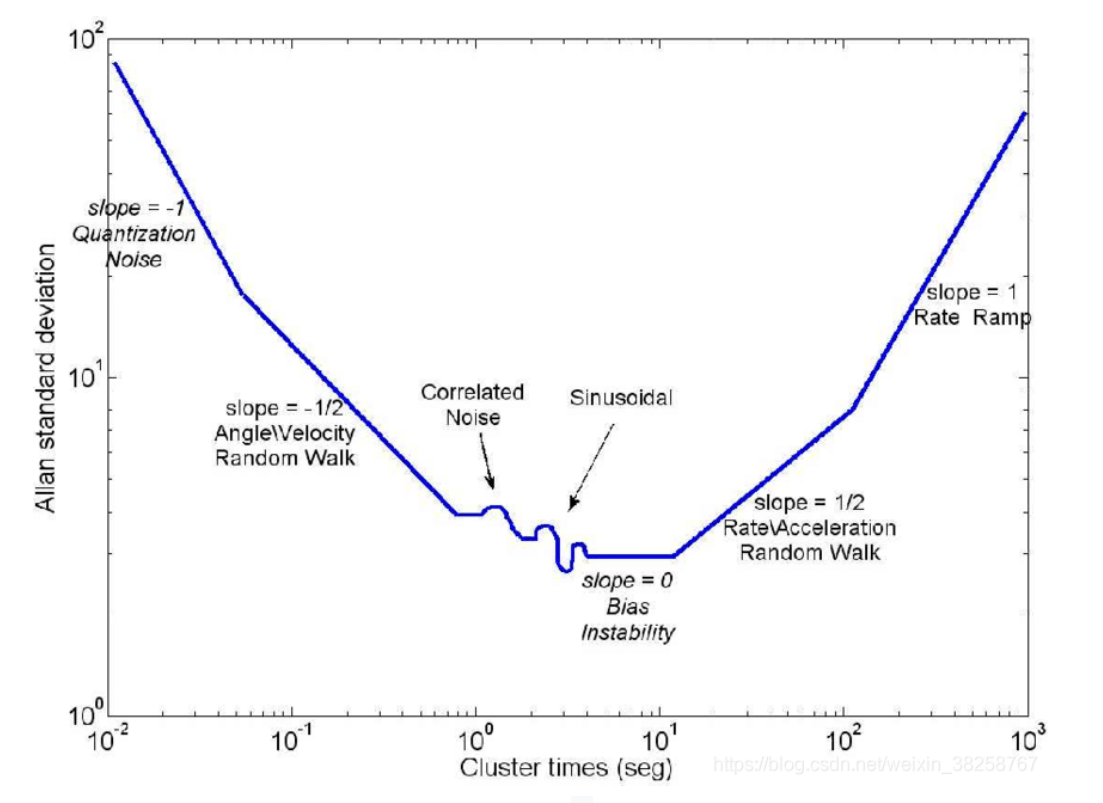
由此可见在Allan方差双对数图上,量化噪声对应的斜率为-1,它与 τ=1交点的纵坐标读数为√3Q(或Δ/2)
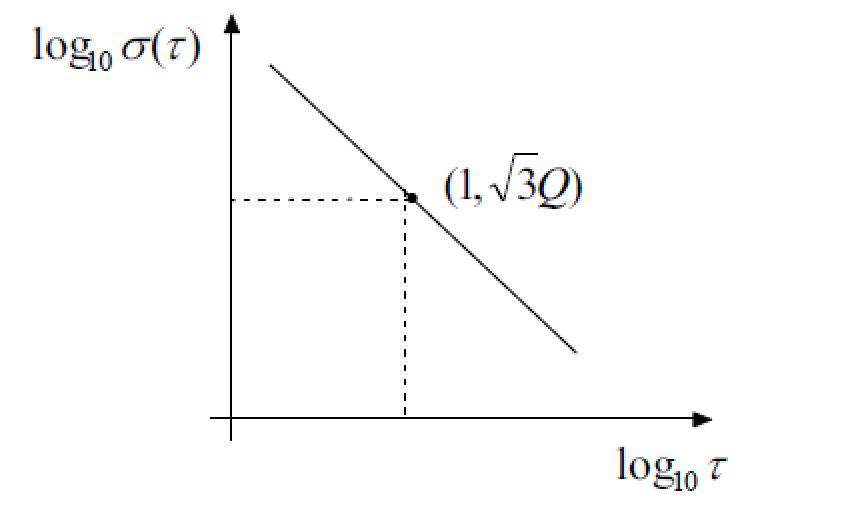
量化噪声具有很宽的带宽,属于高频噪声,在实际应用中可进行低通滤波处理或大部分被导航姿态更新(积分)环节所滤除,因而一般对系统精度的影响不大。
2.2 Rate white noise
下面以角度随机游走为例来解释Rate white noise。角度随机游走(ARW)是角速率白噪声积分的结果,即陀螺从零时刻起累积的总角增量误差表现为随机游走,而每一时刻的等效角速率误差表现为白噪声。根据随机过程理论,随机游走是一种独立增量过程,对于陀螺角度随机游走而言“独立增量”的含义便是:角速率白噪声在两相邻采样时刻进行积分(增量),不同时间段的积分值之间互不相关(独立)。
对于角度随机游走,从角速率方面看,其功率谱为常值(白噪声)
式中:N 也称为角度随机游走系数

因此在Allan方差双对数图上,Rate white noise的斜率为-1/2,它与τ=1的交点纵坐标读数即为角度随机游走系数N
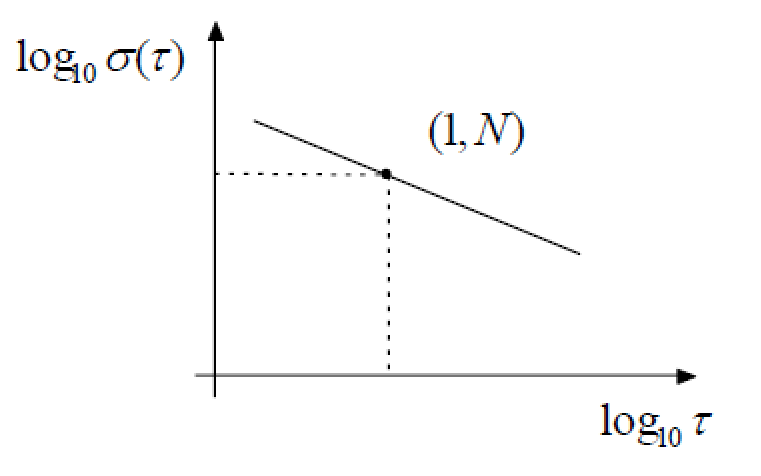
前面推导的是连续时间角速率理想白噪声与Allan 方差的关系,但实际中如果陀螺输出的是角速率信号,且一般进行离散化采样,则角速率噪声总是有限带宽的。根据频谱分析理论,在带限范围内采样频率越低则对应的功率谱幅值N*N越大,从而得出的Allan 方差随机游走系数也会偏大,因此Allan 方差分析还受角速率采样频率的影响,建议在陀螺带宽内应尽量提高采样频率,比如取两倍的带宽频率,能达到4 倍~6 倍或以上则更佳。然而,如果陀螺输出的是角增量信号,在角增量输出中隐含了积分(平均)过程,则Allan 方差的角度随机游走系数与采样频率无关。
2.3 Rate Random Walk
下面以角速率随机游走来介绍Rate Random Walk。、
角速率随机游走是宽带角加速率白噪声积分的结果,即陀螺角速率误差表现为随机游走,而角加速率误差表现为白噪声。
角加速率的功率谱为
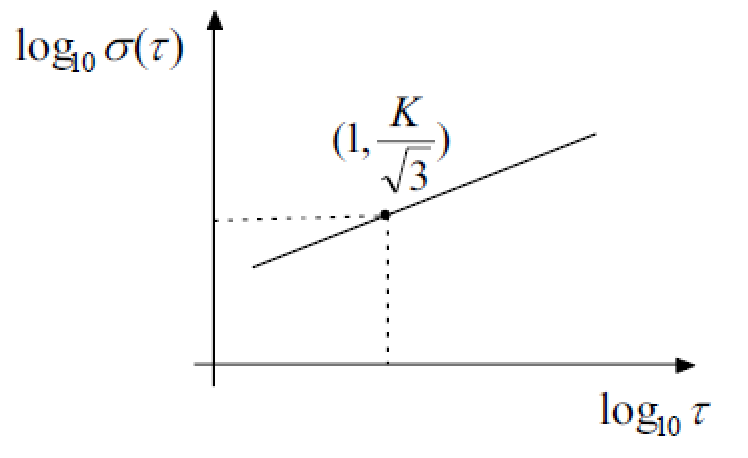
式中:K 为角速率随机游走系数,根据随机积分功率谱关系式,得角速率的功率谱为
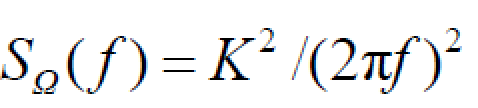
Allan方差

因此在Allan方差双对数图上,Rate Random Walk的斜率为1/2,它与τ=1的交点纵坐标读数即为角度随机游走系数K/√3
2.4 零偏不稳定噪声(Bias instability)
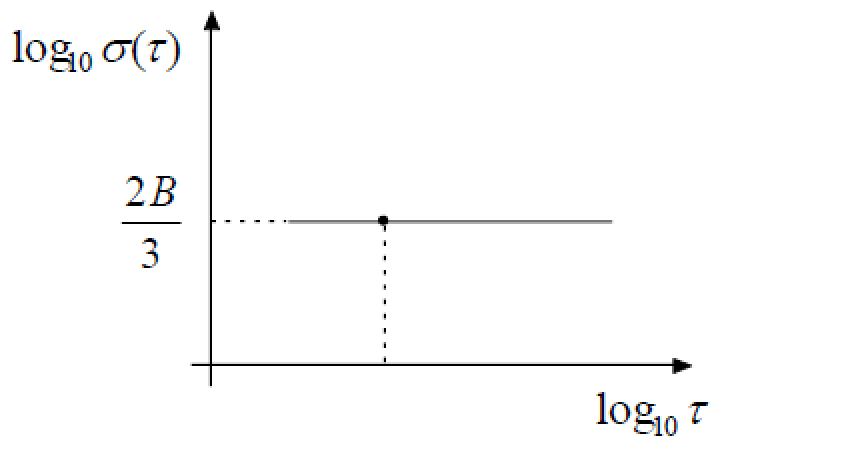
零偏不稳定性噪声又称为闪变噪声或1/f 噪声,顾名思义,其功率谱密度与频率成反比,即零偏不稳定性噪声的功率谱为

式中:B 为零偏不稳定性系数
Allan方差为:

因此在Allan方差双对数图上,零偏不稳定性噪声的斜率为0,它与τ=1的交点纵坐标读数即为角度随机游走系数2B/3 。
零偏不稳定性噪声具有低频特性,在陀螺输出中表现为零偏随时间的缓慢波动。
2.5 速率斜坡 (Rate Ramp)
下面以角速率输出的陀螺仪为例介绍速率斜坡。
若陀螺的角速率输出随时间缓慢变化,比如由环境温度引起,假设输出与测试时间呈线性关系,即
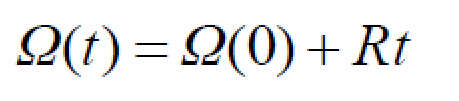
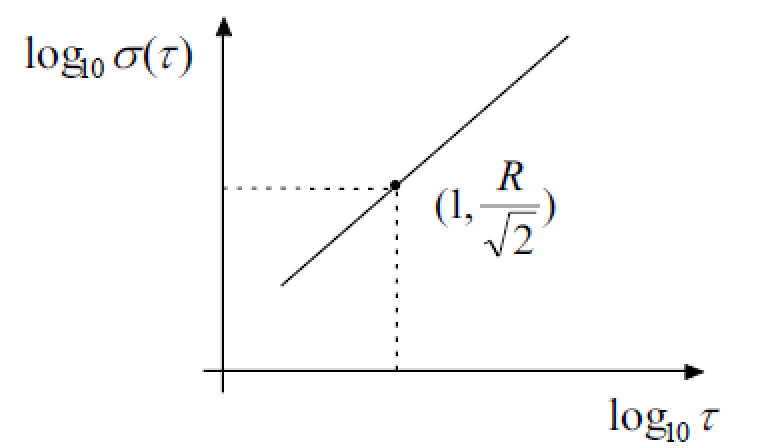
式中:R 为速率斜坡系数,或通俗地看成常值角加速率误差系数。直接根据Allan 方差的定义计算,可得

故

可见,当角速率误差随时间线性变化时,在Allan方差双对数图上,速率斜坡的斜率为1,它与τ=1的交点纵坐标读数即为角度随机游走系数R/√2。
实际上,角速率斜坡更像是一种确定性的误差,而不是随机误差。角速率斜坡常常由系统误差引起,比如环境温度的缓慢变化,通过严格的环境控制或引入补偿机制往往可以降低此类误差。
3. Allan方差的应用
Allan方差可以用来查找影响惯性传感器的主要误差源,为改进设计和制造服务;也可以获取惯性传感器误差的建模参数,提高现有产品的实际使用精度。
以光纤陀螺为例,理论研究表明:量化噪声与陀螺的数字量化输出有关;角度随机游走噪声主要来源于光路的光子自发辐射,特别是光电探测器和电子器件的高频噪声;速率斜坡与环境温度缓慢变化有关等。所以,在Allan 方差分析之后,获得各项噪声系数,针对主要误差源并结合物理机理有可能为改进陀螺提供依据。
有些应用场合,比如在姿态稳定和跟踪系统中,量化噪声是一种重要的噪声源,一般先采用高速采样方法从总体上降低量化噪声的功率谱幅值,然后通过低通数字滤波器滤除高频段噪声,但是滤波器往往会造成相位延迟和使测量带宽降低,影响系统控制精度甚至稳定性。很明显,陀螺信号通过低通滤波器后,功率谱必然会产生畸变,如再使用Allan方差进行量化噪声系数分析,估计结果实际上包含了滤波器幅频特性的影响,它与原始陀螺信号的噪声系数之间存在差别。在短时间应用场合,比如短时姿态控制中,陀螺信号通过低通滤波器后再进行Allan方差分析会发现,低通滤波确实可以提高某些性能参数,特别是代表短、中期精度的量化噪声系数甚至角度随机游走系数,但滤波对陀螺中、长期精度的零偏稳定性和速率斜坡影响很小,也就是说,低通滤波对于长期应用场合,比如长时间导航任务,性能改善一般不明显。由此可见,陀螺输出信号作低通滤波或进行所谓的降噪处理对导航应用一般意义不大,而最根本的手段应当是通过深入分析陀螺内部机理,改善设计和工艺,从源头上降低代表中长期精度的低频噪声和误差。
陀螺随机漂移误差Allan方差分析也可应用在组合导航系统中。在基于状态空间模型的Kalman 滤波组合导航系统中,常常假设陀螺随机漂移ε的模型为
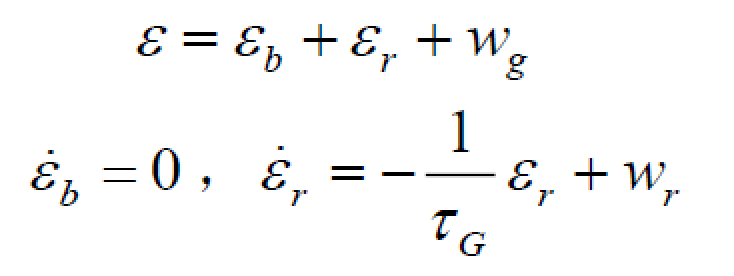
εb为逐次启动漂移(随机常值);εr为马尔可夫过程(慢变漂移);wg为白噪声(快变漂移)
对比前面Allan 方差分析可知,这里wg项即为陀螺角度随机游走中的角速率白噪声,而εr为指数相关噪声。实际陀螺的Allan 方差分析中可能给出多种误差源,理论上,若将所有误差因素都进行建模纳入状态方程,Kalman 滤波效果最好。但是,基于Allan 方差估计的陀螺模型参数存在一定的误差,况且有些误差源转化为状态方程也非常困难,比如1/f噪声。建模中考虑因素越多状态方程的阶数就越高,滤波计算量将急剧增大,实践还表明高阶状态方程中不准确的模型参数越多就越容易导致数值计算不稳定,估计效果反而变差。因此, 在组合导航应用中一般对陀螺建模进行简化处理,只需考虑其中便于处理的主要误差项。
总结如下