
杠杆系统
完成了对转矩的解读后,我们进而可以对人体在不同情况下产生的转矩进行讨论。这一原理被认为是人体杠杆系统。扭转需要扭转的旋转轴和杠杆,如同我们熟悉的自行车踏板一样。杠杆系统需要具有施加在杠杆上的力,如果这个力大于扭转的阻力,就会发生角运动。对于自行车踏板来说,人通过向下踩踏踏板来施加力。如果施加的这个力大于阻力,曲柄将被转动,自行车就会发生移动。如果试图骑着自行车上一个陡坡,但却没有向踏板施加足够大的力,则曲柄无法被移动,自行车也就无法被骑上陡坡。
在学习杠杆系统在人体运动中如何运作之前,我们先来看看杠杆系统的组成部分。杠杆系统包括旋转轴(或者说支点)、力臂(通常是人体肌肉)和阻力臂(通常是需要被移动的对象)。有的人可能会由于不擅长数学而感到焦虑,但是杠杆系统是非常简单的系统,并且只需要进行两个数据的乘法运算:一是施加的力的大小(可能是移动一定质量的物体所需的力或移动一定质量的物体需克服的阻力),二是施力点与支点的距离。我们可以使用跷跷板来说明这个原理,如图1所示。
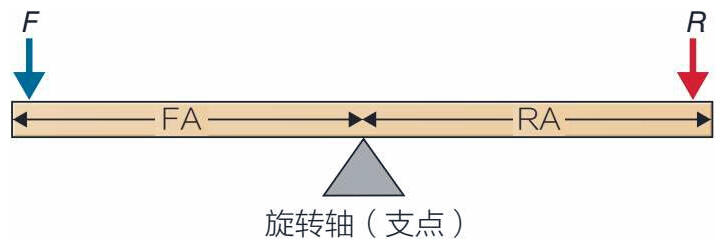
图1 杠杆系统的组成:旋转轴(或者说支点),力臂(通常为人体肌肉)和阻力臂(通常为需要被移动的对象)
●计算杠杆系统所需的力(F,包括移动杠杆需要的所有的力)时,需要使用施力点与旋转轴之间的垂直距离,也就是力臂,或者说杠杆臂,即图1中的FA。
●我们还需要计算冲力或转矩(后文会对此进行更加详细的介绍)。同样,阻力(R)的发力点与旋转轴之间的距离就叫作阻力臂,即图1中的RA。
●旋转轴通常位于重心位置,而杠杆一般为三角形,或是类似于跷跷板的长板。如果两个同样重的小孩坐在跷跷板的两端,跷跷板会处于平衡状态,也就是说此时施加的力与阻力大小相等。如果其中一个小孩的体重大于另一个小孩的体重,较轻的小孩就会被升高。
杠杆种类
从力学的角度来说,杠杆可以分为3种:一级杠杆、二级杠杆和三级杠杆。这种分级由力、阻力和旋转轴的相对位置决定。在运动员的运动过程中,三级杠杆是最常见的。但是,在运动的完成过程中,运动员会频繁使用各种杠杆。
杠杆系统中的旋转轴、阻力和力的英文首字母分别为A、R和F。A与一级杠杆相关,R与二级杠杆相关,F与三级杠杆相关。
●在一级杠杆中,A(旋转轴)位于阻力和力之间。
●在二级杠杆中,R(阻力)位于关节中心和力之间。
●在三级杠杆中,F(力)位于旋转轴和阻力之间。
一级杠杆
一级杠杆中,旋转轴位于力和阻力之间,如图1所示。力臂是施力点与关节中心之间的距离,而阻力臂是阻力的发力点与旋转轴之间的距离。
●力臂和阻力臂的长度可以相等,如图1所示;也可以不相等。
●如果力臂的长度大于阻力臂的长度,杠杆就有利于力的输出,也就是说这个杠杆可以将运动员发出的力量放大。因此,在旋转轴的另一端,阻力会加大。
●如果力臂的长度小于阻力臂的长度,杠杆就有利于阻力的输出。
●力输出减少,运动速度会加快,运动距离会增长,而力输出增加仅能在速度降低和距离缩短的情况下出现。因此,不同力臂长度的杠杆总是各有优势。
我们在体育运动中也可以看到它们各自的优势,比如,举重训练机器会在设计中使用一级杠杆。图2是腿部推蹬机的简单图解。运动员在旋转轴的一侧用双腿施加力量,而旋转轴的另一侧的配重片在施加阻力。有些腿部推蹬机有两组与推力方向相反的踏板,其中一组的位置要低于另一组。
使用较低的踏板推起配重片要比使用较高的踏板轻松很多。这是为什么呢?
●较低的一组踏板的力臂(也就是运动员双腿的施力点与旋转轴之间的垂直距离)比较高的一组踏板的力臂更长。
●因此,在双腿施加相同大小力量的情况下,踏板较低的一组会产生更大的转矩。
●运动员在顺时针方向施加的转矩必须大于配重片在逆时针方向施加的阻力。
但是,如果运动员想要在使用较低的一组踏板时增加运动效果,就必须舍弃其他的一些运动效果。这种情况下,由于不同形式杠杆的优势不同,运动员如果选择使用较低的一组踏板,就必须完成比较高的一组踏板所需的更大弧度的动作。

图2 使用一级杠杆的腿部推蹬机:a.当使用较高的一组踏板时,力臂缩短,需要施加更大的力来举起配重片;b.当使用较低的一组踏板时,只需要施加较小的力来举起配重片
二级杠杆
二级杠杆中,力与阻力在旋转轴的同一侧,通常情况下,力臂大于阻力臂,如图3所示。
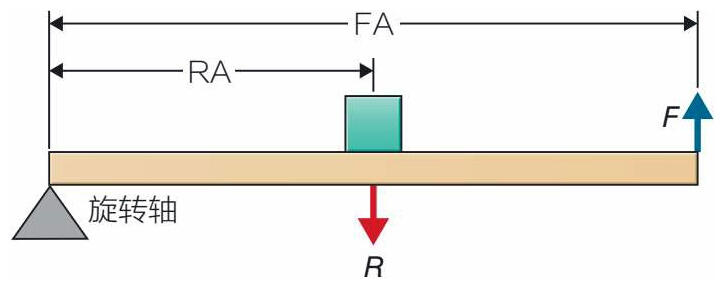
图3 二级杠杆
施加的力(可能为运动员施加的力)试图向一个方向(逆时针)移动,而阻力试图向相反方向(顺时针)移动。如果施加的力足够大,则施加的力将与阻力向相同的方向移动。力臂的长度越是大于阻力臂的长度,输出的力就越大。使用二级杠杆的运动员只需要通过较长的力臂施加较小的力和较快的动作,就能以较慢的速度和较短的阻力臂来克服较大的阻力。以下示例展现了上述特征。
在图4中,运动员正在多功能举重训练机上进行仰卧推举,在这一过程中主要应注意以下几方面内容。
●运动员向上推动连接杆子的把手,杆子在机器左侧的旋转轴处发生扭转。
●配重片由辊轴支架支撑,在杆子上运动。配重片与旋转轴的距离小于把手与旋转轴的距离。
●运动员向上做弧线运动时施加的力使配重片垂直向上运动。
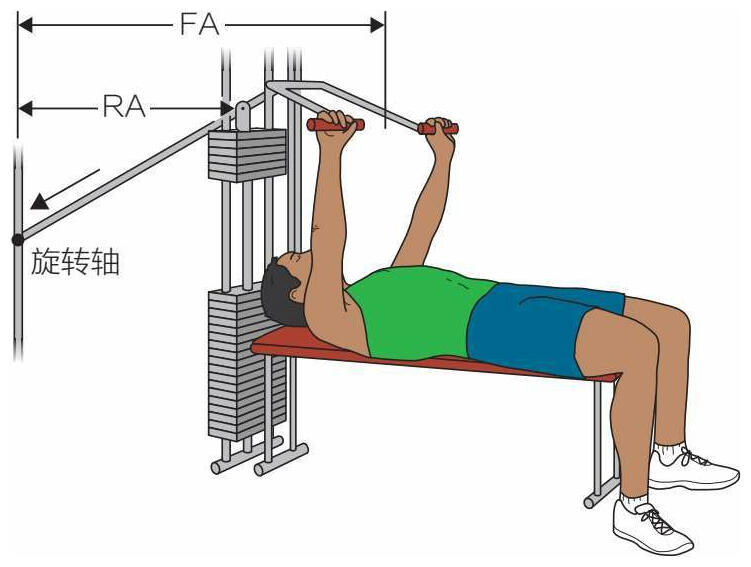
图4 在多功能举重训练机上进行仰卧推举。运动员需要推举起配重片的重量,所使用的杠杆为二级杠杆
当运动员的双臂完全伸展后,与阻力臂相比,力臂的长度被缩短了。
也就是说,当运动员伸直双臂并且双臂肌肉、胸部肌肉和双肩肌肉进入高效的工作状态时,多功能举重训练机也会自动通过缩短力臂长度来适应这一变化。
三级杠杆
三级杠杆中,旋转轴在杠杆的某个末端,力臂的长度通常小于阻力臂的长度,如图5所示。与二级杠杆相似,如果施加的力足以克服阻力,那么阻力的方向将与施加的力的方向相同。这也正是二级杠杆和三级杠杆与一级杠杆的不同之处。在一级杠杆中,力与阻力的方向相反;在三级杠杆中,形成阻力的物体进行比提供动力的物体更大幅度、更快速的运动,因此,施加的力要大于阻力。
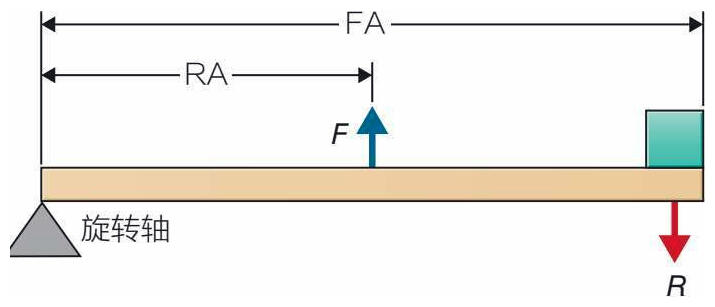
图5 三级杠杆
肱二头肌弯举是三级杠杆的经典例子,因为它展示了肌肉、骨骼和关节之间的关系,还说明了肌肉必须发出较大的力来克服较小的阻力。
在图6中,运动员用力握住哑铃,因此哑铃既没有上升也没有下落。运动员的肱二头肌产生的逆时针的旋转力(转矩)与运动员的前臂重力和哑铃重力所构成的顺时针的阻力大小相等。在这一例子中,我们将阻力臂与力臂的长度比设定为10:1。
●如果阻力为10个单位,阻力臂也为10个单位,那么阻力在顺时针方向的转矩则为100个单位(10×10=100)。
●如果力臂为1个单位,那么需要对抗前臂和哑铃共同重量的力量则为100个单位,或者说是阻力的10倍。
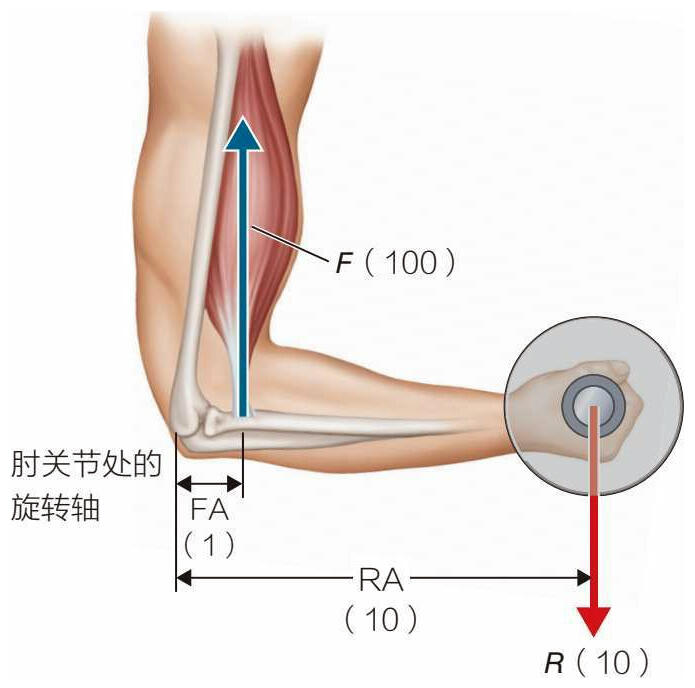
图6 肱二头肌弯举是人体中的三级杠杆
还有一个需要注意的内容是,当力臂处于水平位置时,肱二头肌常常会以略小于90度的角度拉动前臂。这有助于前臂向上扭转,同时也可以将前臂拉向肘关节,有助于增加关节的稳定性(从生理学的角度来说,这有助于肘关节的闭合)。
图7特意夸张了肱二头肌在弯举时所形成的角度,使肱二头肌产生的力在图示中更加明显。在图7中,肱二头肌的收缩将前臂拉向上臂,拉动方向大约与垂直方向的力成25度角。肱二头肌拉动前臂的力与前臂并不垂直,这意味着肱二头肌收缩产生的力有一部分被应用于其他部位,因此没有参与转矩的产生。在图7中,各字母所代表的内容如下。
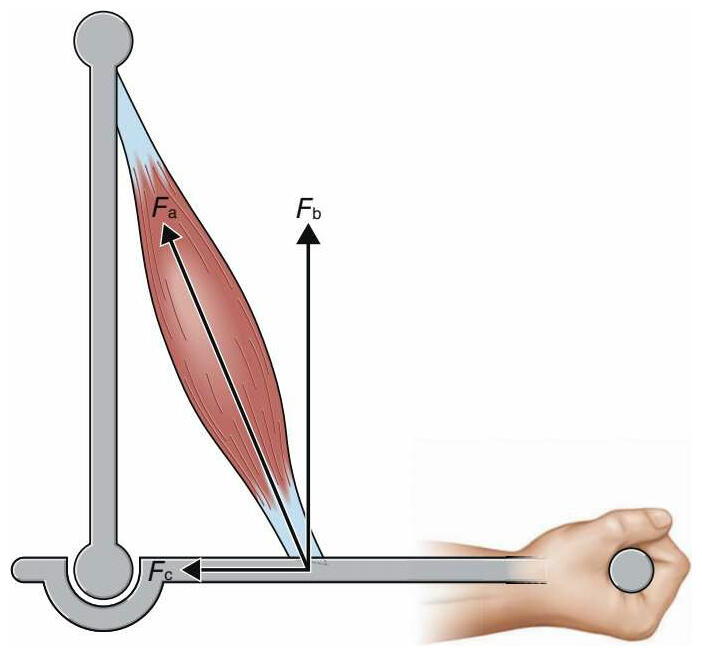
图7 肱二头肌在小于90度的角度下进行收缩,所产生的力Fa可分为与前臂垂直的力(Fb)和朝向肘关节的力(Fc)(此图夸张了肱二头肌的运动角度,以使图示足够清晰)
● Fa代表着肱二头肌的收缩对前臂产生的力。
● Fb代表着转化为转矩并举起前臂的那一部分力。
●Fc代表着应用于肘关节的力。
人体中的三级杠杆通常为关节附近通过收缩产生巨大转矩的肌肉。但是这样的转矩需要在很长的杠杆中进行传输。杠杆的长度越长,最终能够被抵消的阻力就越少。在肱二头肌弯举中,由于肱二头肌在非90度的角度下拉动前臂,其初始发出的100个单位的力会被大大减小,肱二头肌与前臂的连接处产生的扭转力也会由于力臂的增长而被减弱,这样肱二头肌产生的力最终到达运动员的手部时,已经被大大削弱了。但是运动员还是能够从中得到锻炼。
体育应用
奥林匹克撑竿跳高与荷兰式撑竿跳的差异
撑竿跳高运动中的一项规则是运动员不能移动握竿位置。这一规则的制定是因为在过去,撑竿跳高选手会爬上竿子。在荷兰,至今仍存在爬竿比赛。在爬竿的过程中,运动员不停地改变杠杆的长度。荷兰式撑竿跳中运动员会跳过流水的运河。爬得越高,运动员落地时的距离就越远。如果爬得太快或爬得太高,运动员可能会掉入水中,甚至落回出发点。观众喜欢的就是这种戏剧性的时刻和流畅的跳跃。当撑竿跳高运动员攀爬竿子时,他们施加力的速度会放慢。如同音乐家使用节拍器一样,增加力量时,节拍器的开合节奏会变慢;如果不断增加力量,节拍器就会渐渐停止。同样的原理也可以应用在荷兰式撑竿跳运动中。
