
数字信号处理的主要内容
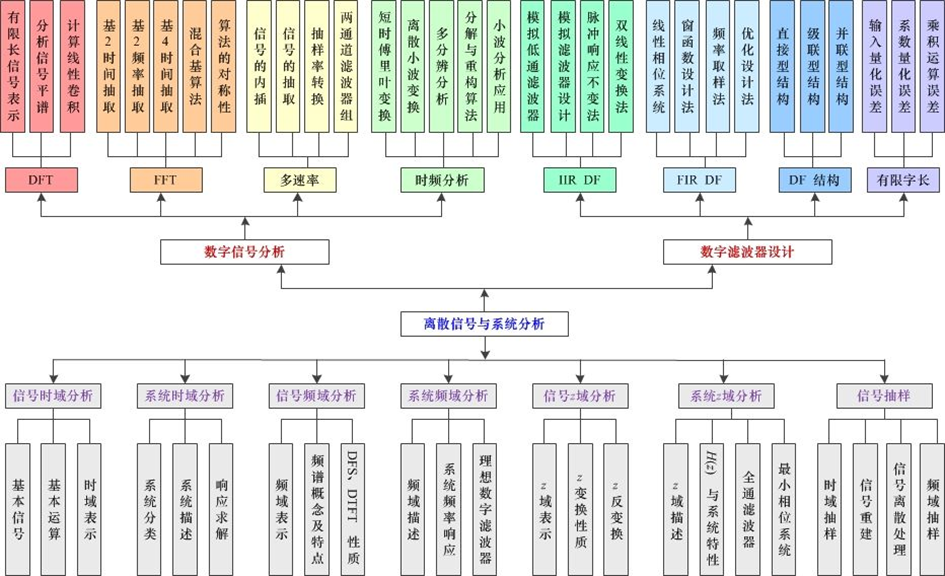
离散信号与系统分析
1. 为什么学习本章
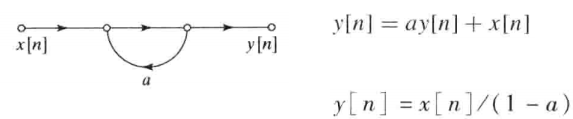
LTI离散系统的三种表示形式:①系统函数;②单位脉冲响应;③差分方程。
系统函数:适合系统的设计与分析,比如因果、稳定、滤波特性等分析。
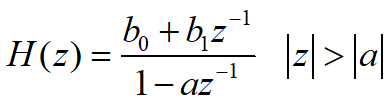
系统函数H(z)的举例
单位脉冲响应:无限长脉冲响应,用离散卷积运算不现实。

单位脉冲响应的举例
差分方程:可以采用递推来实现,适合实时计算。

差分方程的举例
对LTI离散系统:
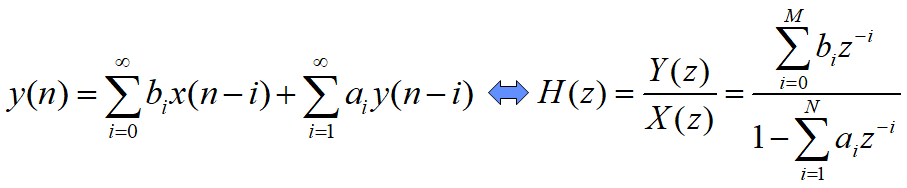
LTI离散系统的例子
对于同一个LTI离散系统,有无限种运算结构。当变量和系数以无限精度表示时,不同运算结构是等价的,但用有限精度表示时,可能存在巨大差异。(有必要研究不同的运算结构)
不同的系统函数对应不同的算法、不同的算法直接影响系统运算误差、运算速度,同时影响系统的复杂程度和成本。
2. 用信号流图表示网络结构
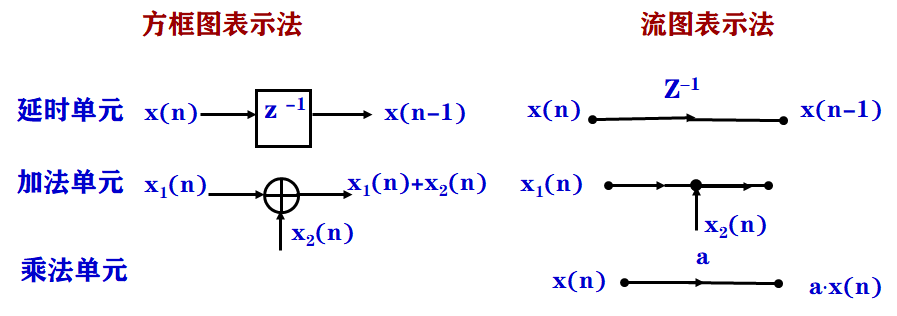
实现数字信号处理的三种基本运算单元:①加法器;②单位延迟器;③常数乘法器。
三种基本运算的表示方法:①方框图法;②信号流图法。
方框图表示法、信号流图表示法的示例。
信号流图
不同的信号流图代表不同的颜色丰富,对于同一个系统函数可以有多个信号流图去对应。
基本信号流图:①所有支路的增益是常数或者Z^{-1};②流图环路中必须存在延时支路——如果环路不存在延时,可能无法计算;③节点和支路的数目是有限的。
存在不可计算但可解的信号流图。
不可用电脑计算,但是可解的信号流图(不是基本信号流图)
基本信号流图对应一种具体的运算方法,非基本信号流图不能用一种具体的运算方法来实现。网络结构可以通过基本信号流图来描述。
从基本信号流图求系统函数H(z)的过程:设置中间节点变量、联立方程组、求解方程组、消除中间节点变量、确定流图的输入输出关系。根据输入输出关系求出系统函数H(z)。
网络结构分类:按照脉冲响应的长度分类。
无限脉冲响应(IIR)网络、有限脉冲响应(FIR)网络
IIR滤波器在结构上存在输出到输入的反馈。
FIR滤波器的结构上不存在输出到输入的反馈,信号流图中不存在环路。
系统有极点,则必有反馈,则必定导致无限长脉冲响应。有反馈不一定有极点。
脉冲响应为有限长的充分条件:系统函数无极点。
有的系统,具有反馈回路,但是脉冲响应却是有限的。因为极点和零点相互抵消。
3. 无限长脉冲响应基本网络结构
对于有理系统函数的运算网络结构:直接I型结构、直接II型结构、级联型结构、并联型结构。
用户诉求:①耗时考虑,乘法更少;②耗资考虑,延时单元更少;③算法的可分割性,并行性;④处理器之间的通信,独立性;⑤有限精度的影响,计算受到有限资产影响的灵敏度低。
直接I型:
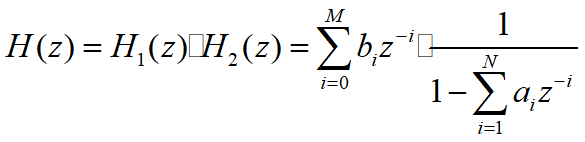
直接I型的原理
直接I型的结构示意图
优点:结构简单、清晰、便于理解。
缺点:①所用运算单元多、延时支路较多;②a、b常数对滤波器的性能控制作用不明显;③零点、极点关系不明显,调整困难;
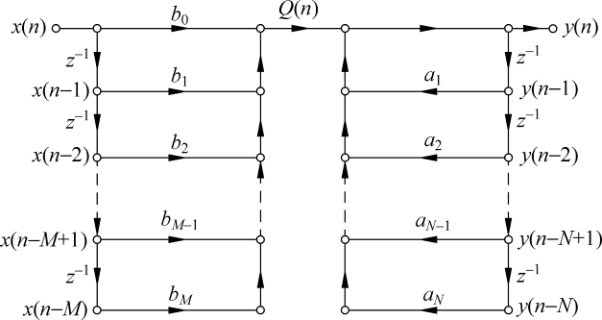
直接II型:
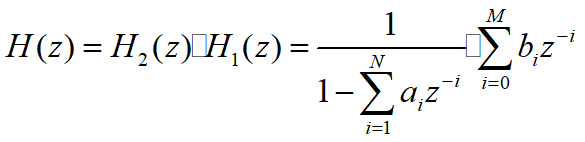
直接II型的原理
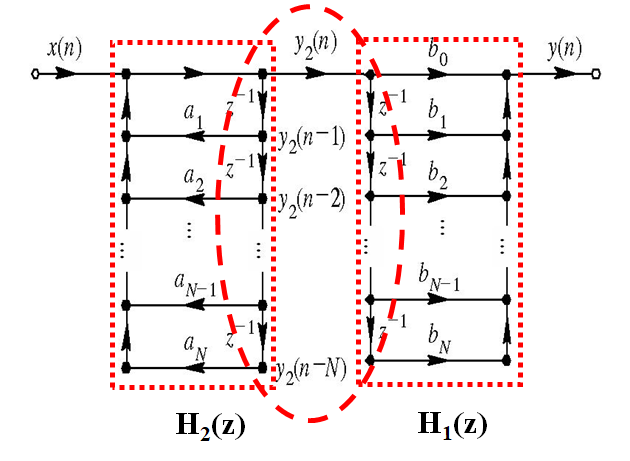
直接II型的结构示意图
直接I型和直接II型的对比
相同之处:①都是直接型的实现方法,共通的缺点是a,b对滤波器的性能控制不明显,因为它们与系统函数的零极点关系不明显,因而调整困难;②直接型机构极点对系数的变化过于灵敏,容易出现不稳定或产生较大误差。
不同之处:II型所需的延时单元较少,可以节省单元或寄存器。
级联型:
先将系统函数按照零点极点进行因式分解
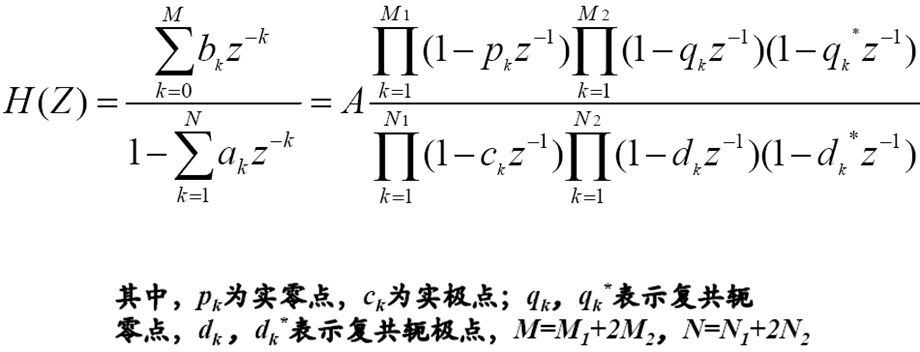
系统函数按照极点零点进行因式分解
再将共轭因子展开,构成实系数二阶因子,则得到:
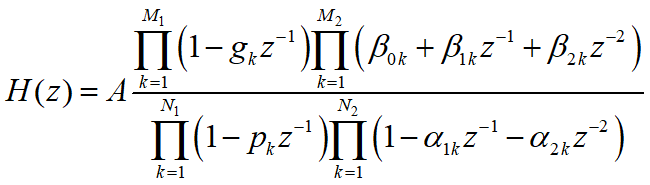
使用实数二阶因子

IIR型级联型网络结构:H(z)= H1(z)·H2(z)·...·Hk(z)

级联型示意图
级联型结构不是唯一的。
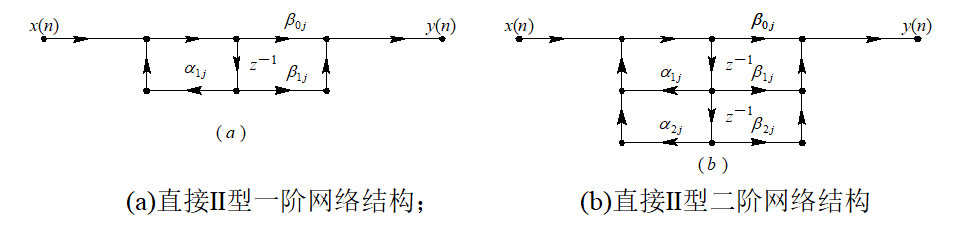
一阶网络结构
一个六阶系统函数可以用三个直接II型的级联表示:
一个六阶系统函数:三个直接II型的级联表示
级联型机构的优点:
①所需存储器最少,系统结构组成灵活,该结构应用广泛。
②每一个基本节与滤波器的一对零点和一对极点有关。
③调整系数β_{0k}、β_{1k}、β_{2k}可以单独调整滤波器第k对零点,而不影响其他零点、极点。
④调整系数α_{1k}、α_{2k}单独调整滤波器第k对极点,而不影响其他零点、极点。
级联型结构的缺点:
①存在误差积累,前级误差会传递到后级,但级联结构中后面的网络输出不会传送到前面,所以运算误差的积累相对于直接型要小。
②零极点配合关系着网络最优化的问题,而最佳配合关系不易确定。级联结构可以有许多不同的搭配关系,不同方案性能不同。
并联型:
把H(Z)占城部分分式形式:

并联型表示:把它展开成相加的形式
其中H_i(z)通常为一阶网络和二阶网络, 网络系统均为实数。二级网络的系统函数一般为:
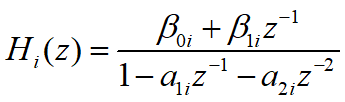
二阶网络
其中β0i、β1i、α1i和α2i都是实数。如果β1i=a2i=0则构成了一阶网络。
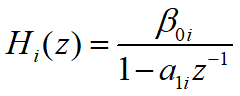
一阶网络
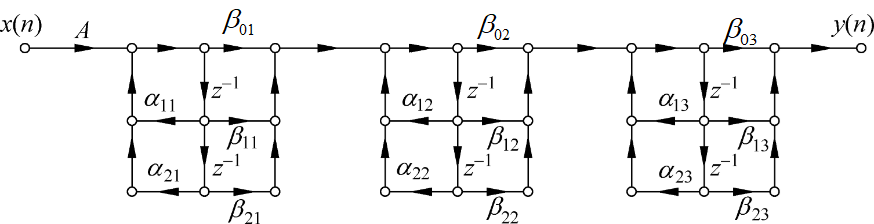
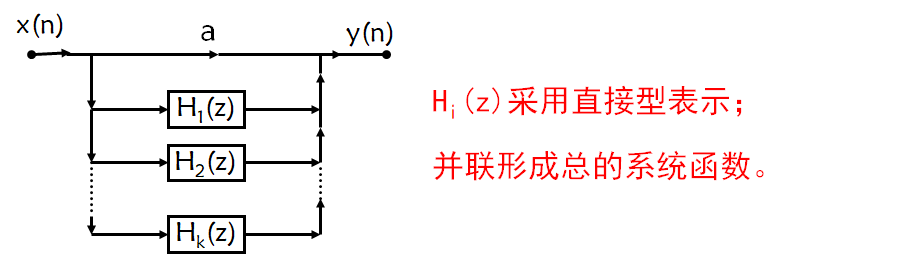
并联型表示:

并联型表示
通过每个二阶(或一阶)网络后,将所有的输出相加可以得到输出y(n)。
并联型表示
同时带有常数、一阶网络和二级网络的并联型网络结构。
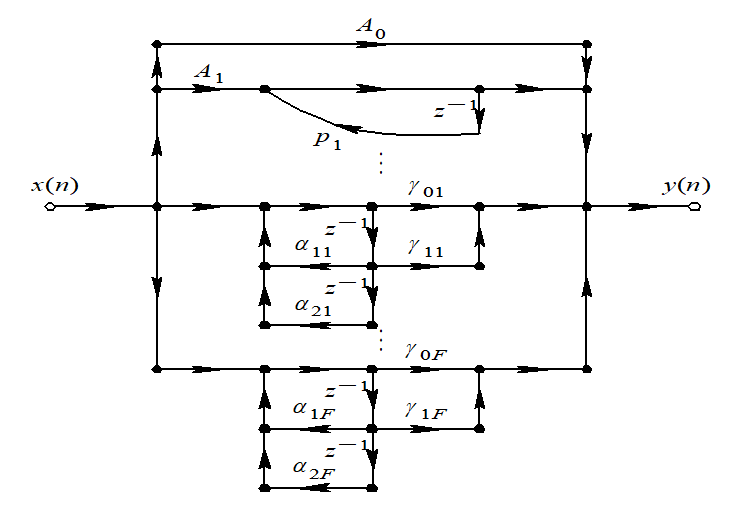
并联型网络结构示例
并联型结构的优点:
① 并联结构可以单独调整极点位置。所以,在要求准确传输极点的场合,宜采用这种结构。
② 各并联基本节的误差相互没有影响,无误差积累,因此并联形式运算误差最小。
③ 基本节并联,可以同时对输入信号进行运算,因此并联型结构运算速度快。
并联型结构的缺点:
① 不能像级联型那样单独调整零点的位置。(因为并联型各子系统的零点,并非整个系统函数的零点)
② 当H(z)有多阶极点时,部分分式展开不易。
IIR网络结构的转置定理
转置形式(流图倒置):如果将源网络中所有支路的方向加以反转,并将输入和输出相互交换,则网络的系统函数不会改变(可由梅森公式得出)
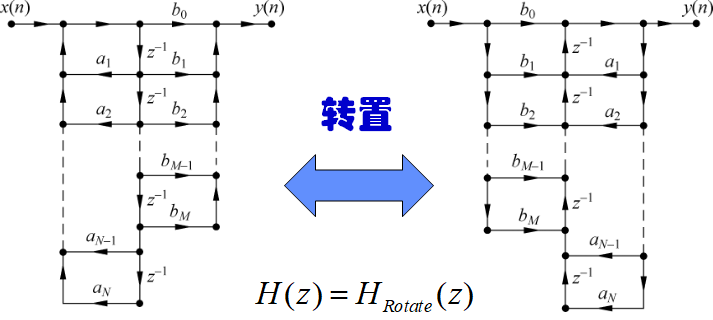
IIR网络结构的转置定理
一阶转置结构

一阶转置结构
二阶转置结构
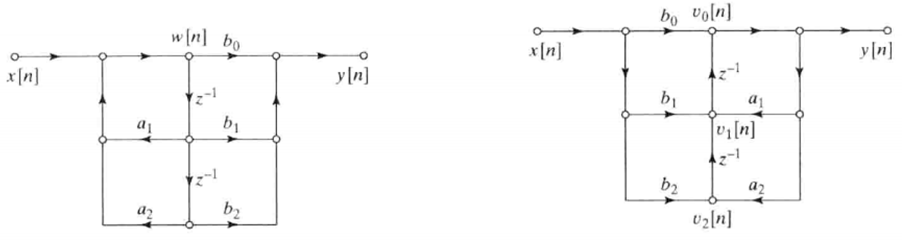
二阶转置结构
IIR基本网络结构的特点比较
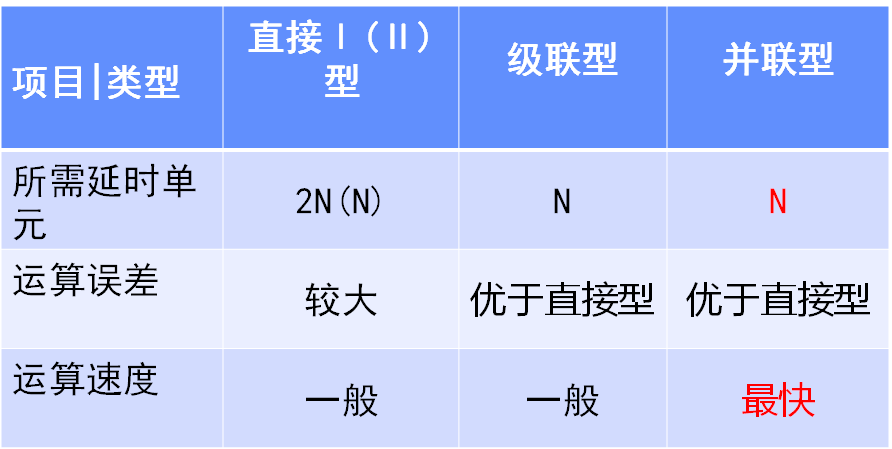
IIR基本网络结构的特点比较
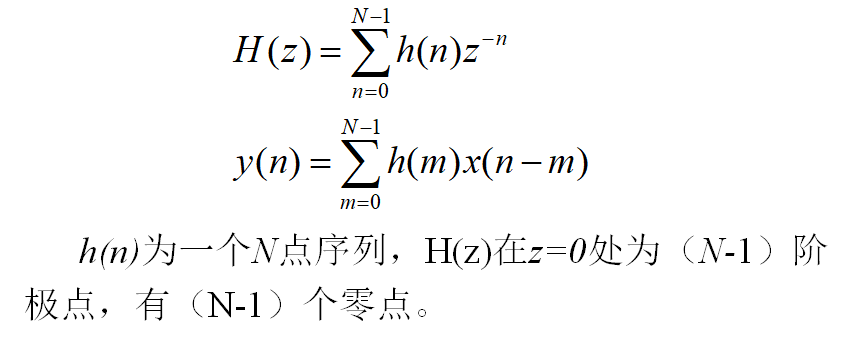
4. 有限长脉冲响应基本网络结构
①FIR网络没有反馈支路,没有环路。
②所有极点都在0处,收敛域为:|z|>0。
③单位脉冲响应是有限长的。
有限长脉冲
FIR滤波器的差分方程
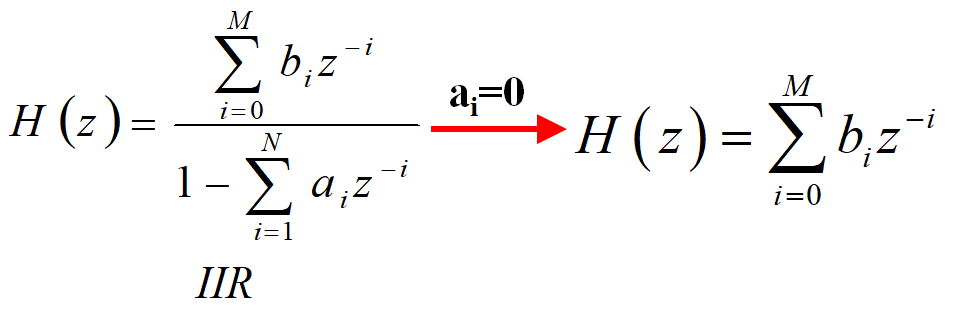
从IIR到FIR的转变
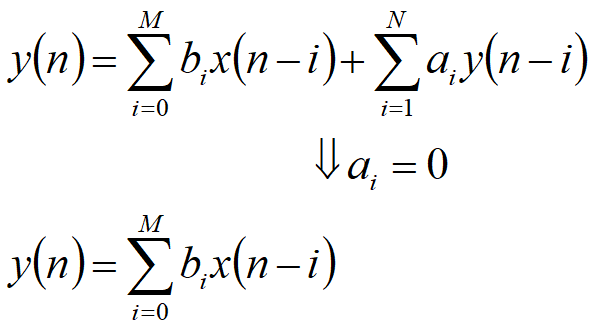
FIR滤波器的差分方程
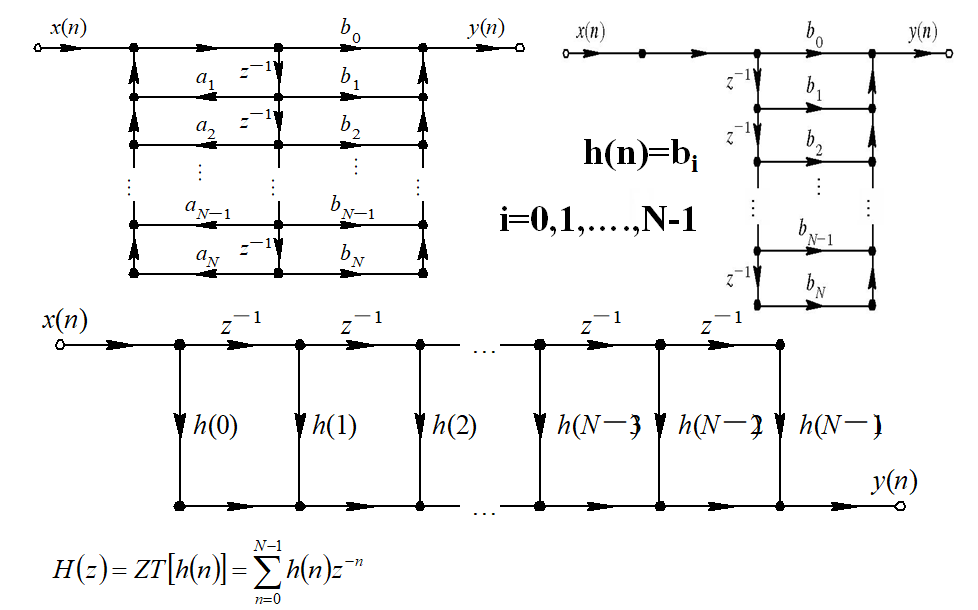
FIR系统的基本网络结构
级联型结构的特点
①级联型机构的每一个一阶因子控制一个实数零点。
②每一个二阶因子控制一对共轭零点。
③调整零点位置比直接型方便。
④所需要的系数比直接型多,因而需要的乘法器多。
5. FIR系统的线性相位结构
线性相位:系统函数的相位和频率成线性关系;这种滤波器的群延时为一常数。
冲激响应h(n)的傅里叶变换H(jω)包括幅频特性和相频特性。

冲激响应的傅里叶变换
系统群延时定义;
系统群延时定义
满足线性相位时
满足线性相位时的相位变化
群延时为一个常数
群延时是一个常数
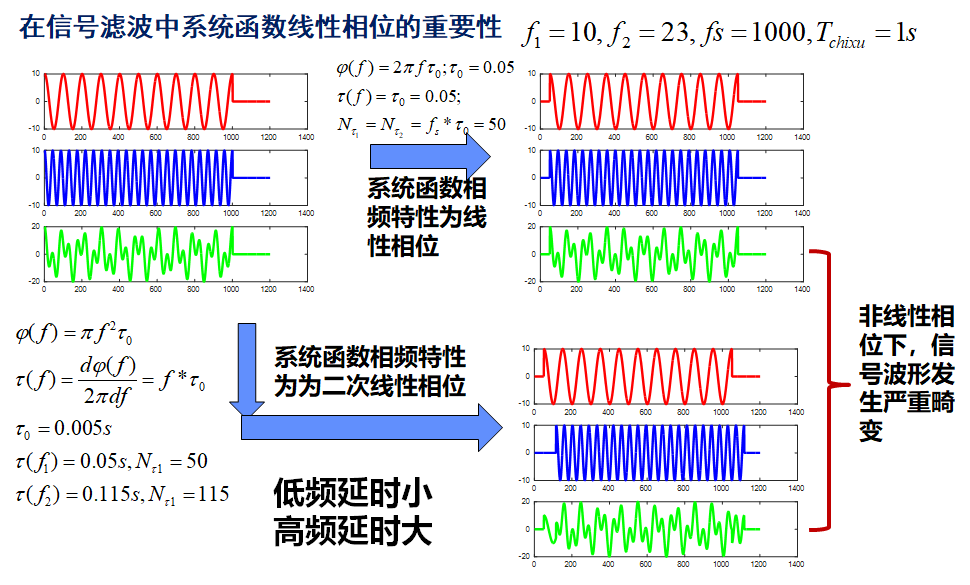
系统函数线性相位的重要性
数据传输、图像处理都需要系统具有线性相位(保证数据、图像不畸变)
在雷达、通信等系统中,要求滤波器具有良好的线性相位特性,以保证信号的无失真传输。
相位在图像中非常重要,甚至比幅度还要重要!
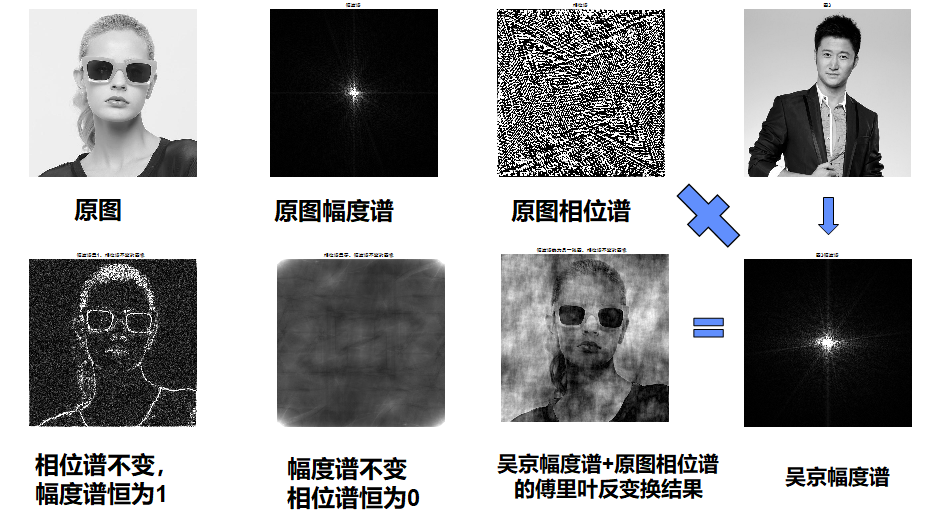
通过相位,可以基本上恢复出原图像的大概外形
图像处理对于系统函数的相频特性要求具有线性相位。
实验原理:将原图变换到频域,乘以不同的系统函数,再反变换。
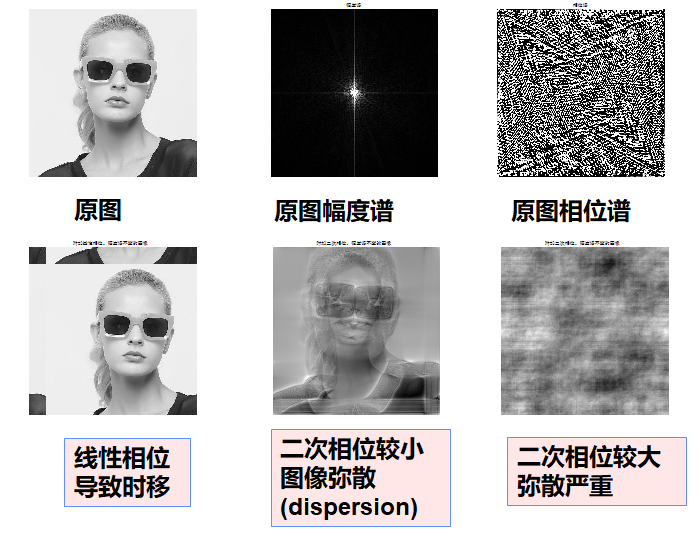
原图和二次相位图像弥散
FIR系统的线性相位结构:
线性相位结构
若FIR系统的h(n)是实数,且满足对称性。即满足约束条件:
h(n)=±h(N-1-n),+为第一类,-为第二类。
也就是说h(n)的对称中心在(N-1)/2,则这种FIR滤波器就具有线性相位。
下面我们针对h(n)的奇、偶进行讨论。
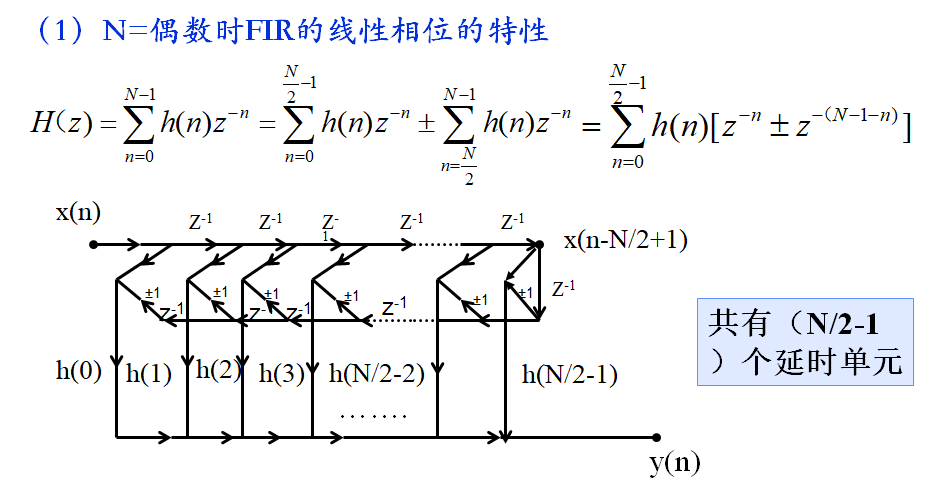
N为偶数时
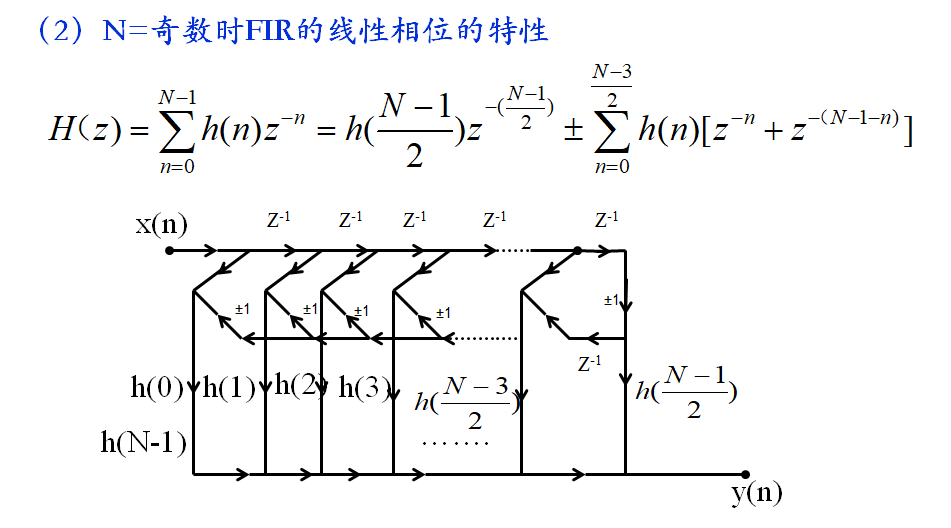
N为奇数时
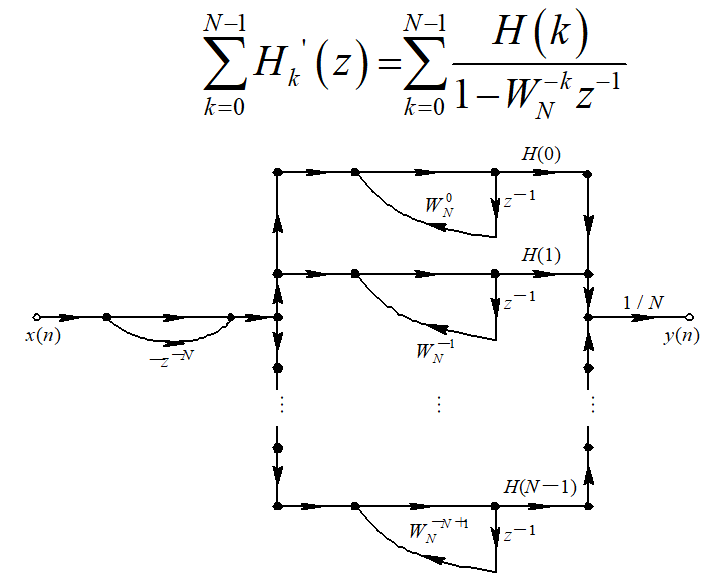
6. FIR系统的频率采样结构
频域采样定理:
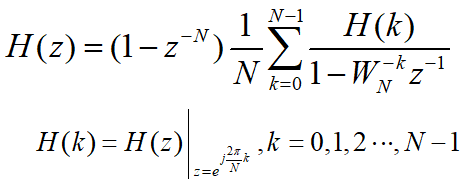
原序列的Z变换H(z)与采样值H(k)满足下面关系式s
频域采样的FIR网络结构。
7. 格型网络结构
全零点格型网络结构。
全零点格型网络的系统函数:全零点格型网络结构的流图。
该流图只有直通通路,没有反馈回路,因此可以称为FIR格型网络结构。

全零点格型网格结构
基本构成单元:
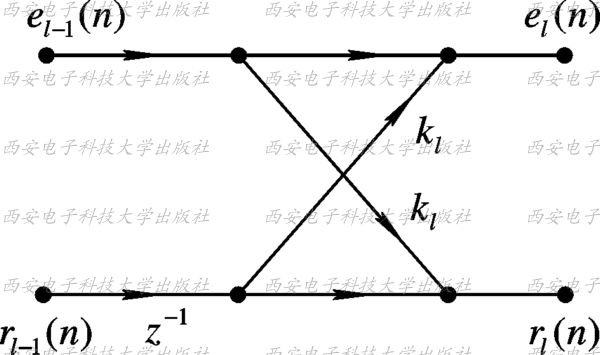
基本构成单元
差分方程如下:
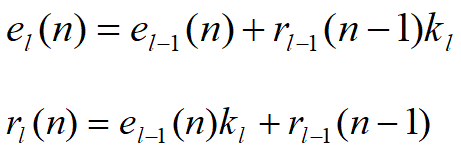
差分方程
Z变换之后:
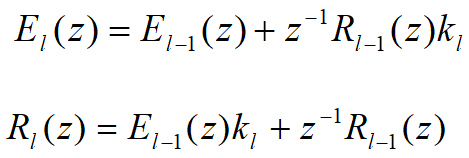
Z变换
矩阵形式、级联之后:
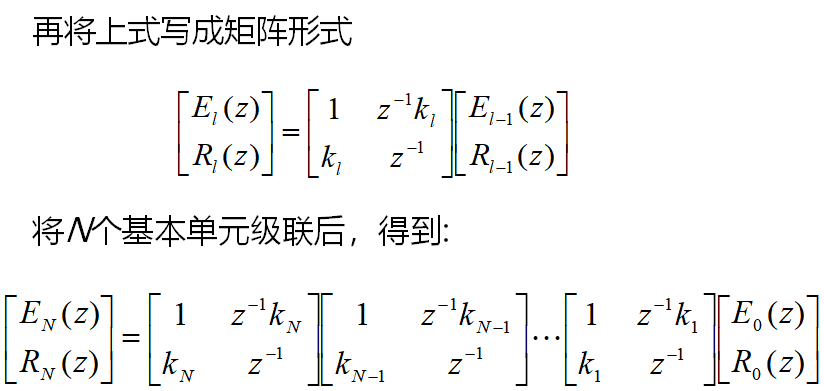
矩阵、级联
系统函数
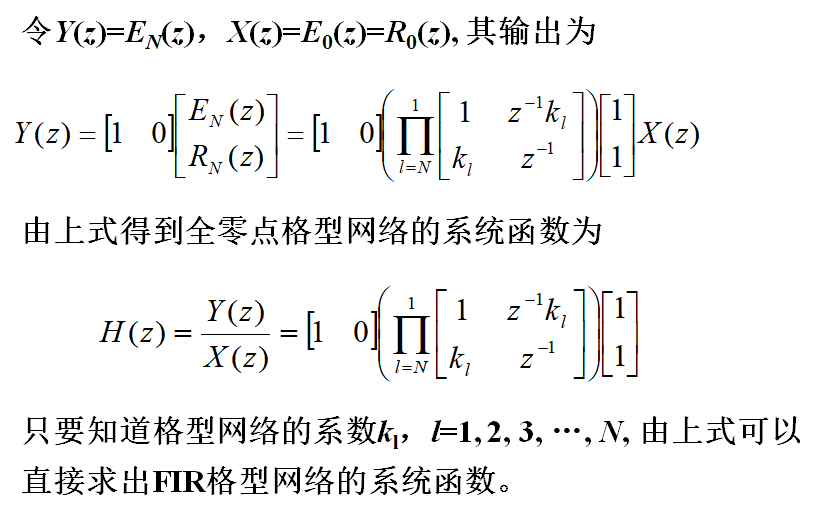
FIR格型网络的系统函数s
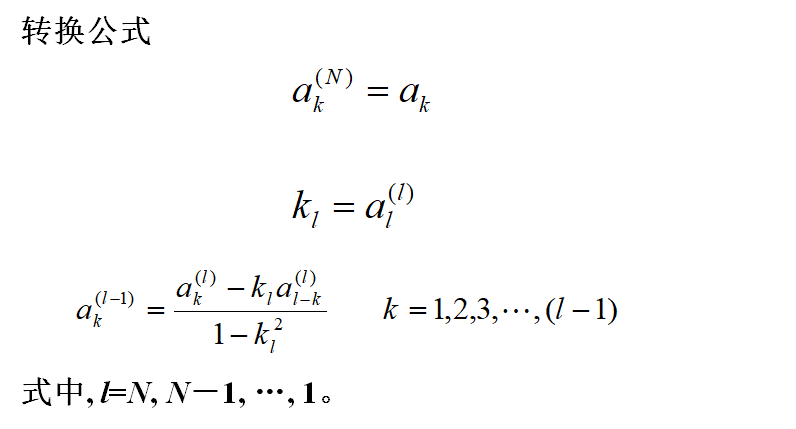
2. 由FIR直接型网络结构转换成全零点格型网格结构
假设N阶FIR型网络结构的系统函数:
系统函数
式中, h(0)=1; h(n)是FIR网络的单位脉冲响应。令ak=h(k),得到:
式中,a0=h(0)=1;k1为全零点格型网络的系数,l=1, 2, …, N。
量化效应带来滤波器性能下降:
以下是一个满足线性相位的FIR低通滤波器,一共27阶,一共27个零点。
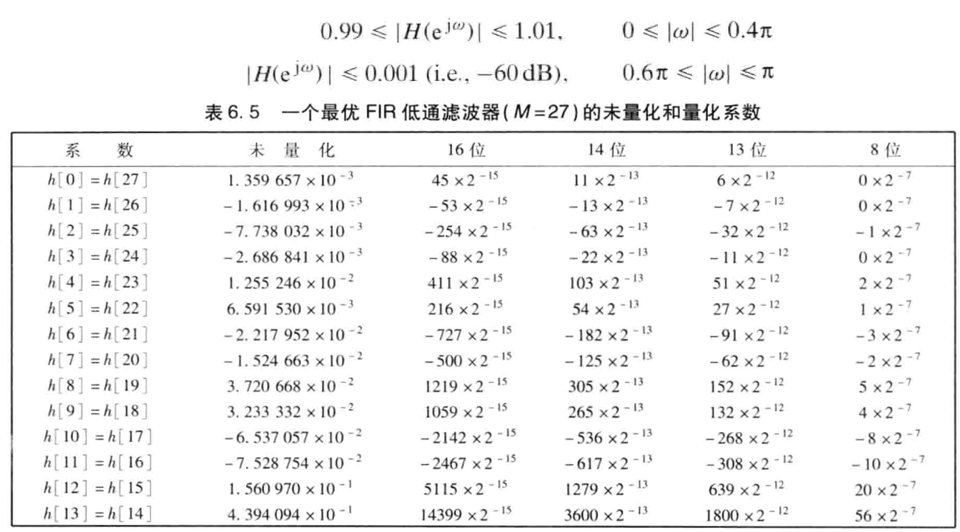
量化系数效应。
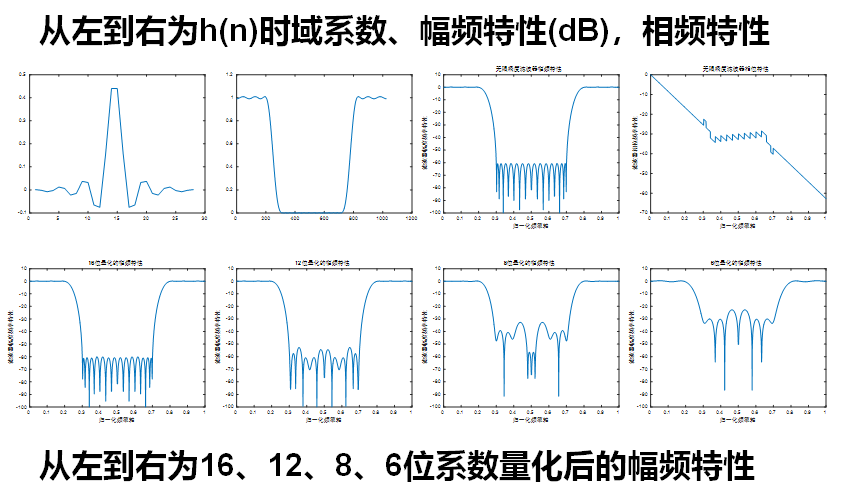
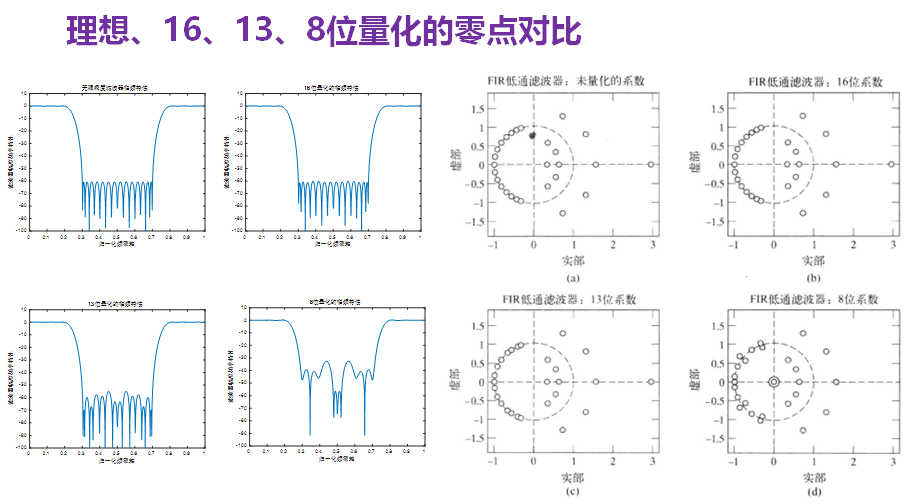
朴素解释:系数量化的噪声具有随机性,因此相当于在原来的滤波器上叠加了一个随机噪声,随机噪声的具有白色频谱,因此,会在整个频带上叠加一个幅频误差,这个幅频误差会降低通带的平坦度,会抬高滤波器截止带的增益。导致滤波器滤波特性下降。
