
自检不通过可以强制修改dmp库中判断:
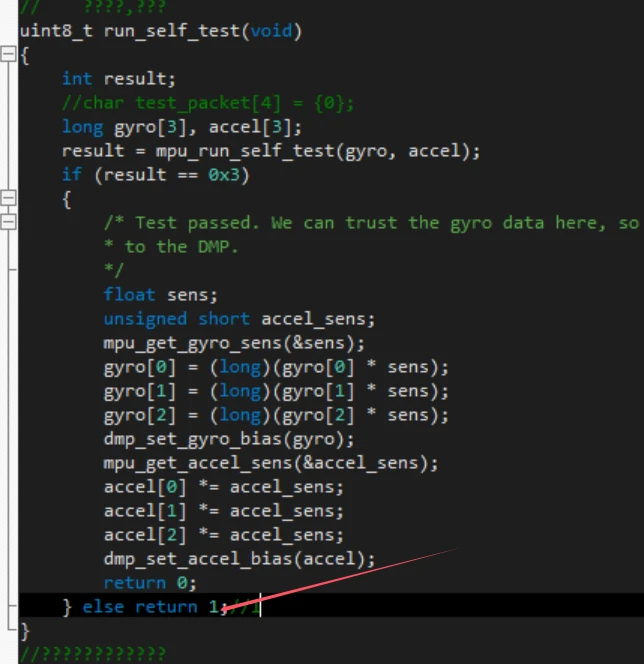
此处改为0即可。
此外尽量不要使用此模块,偏移也比原先版本大很多。
正常版本初始化日志:
=== MPU6050 DMP Initialize Start ===
Checking I2C bus status...
Attempt 1 of DMP initialization...
[mpu_dmp_init] Starting I2C bus initialization...
[mpu_dmp_init] I2C initialization completed
[mpu_dmp_init] Starting MPU6050 initialization...
[mpu_init] Starting MPU6050 initialization...
[mpu_init] Resetting MPU6050 device...
[mpu_init] Reset successful
[mpu_init] Waking up MPU6050 chip...
[mpu_init] Wake up successful
[mpu_init] Checking product version...
[mpu_init] Product version check passed, version: 2
[mpu_init] Setting gyroscope full scale range(2000dps)...
[mpu_init] Setting accelerometer full scale range(2g)...
[mpu_init] Setting low pass filter(42Hz)...
[mpu_init] Setting sample rate(50Hz)...
[mpu_init] Configuring FIFO...
[mpu_init] Setting bypass mode...
[mpu_init] Disabling all sensors...
[mpu_init] MPU6050 basic initialization completed!
[mpu_dmp_init] MPU6050 basic initialization successful
[mpu_dmp_init] Setting sensors (gyroscope + accelerometer)...
[mpu_dmp_init] Sensor setup successful
[mpu_dmp_init] Configuring FIFO...
[mpu_dmp_init] FIFO configuration successful
[mpu_dmp_init] Setting sample rate (100Hz)...
[mpu_dmp_init] Sample rate setup successful
[mpu_dmp_init] Loading DMP firmware...
[mpu_dmp_init] DMP firmware loaded successfully
[mpu_dmp_init] Setting orientation matrix...
[mpu_dmp_init] Orientation matrix setup successful
[mpu_dmp_init] Enabling DMP features...
[mpu_dmp_init] DMP features enabled successfully
[mpu_dmp_init] Setting DMP FIFO rate...
[mpu_dmp_init] DMP FIFO rate setup successful
[mpu_dmp_init] Running self-test...
[mpu_dmp_init] Self-test successful
[mpu_dmp_init] Enabling DMP state...
[mpu_dmp_init] DMP state enabled successfully
[mpu_dmp_init] DMP initialization completed successfully!
DMP初始化成功!
pitch =0.09
roll =0.87
yaw =0.00
翻新版本初始化日志:
=== MPU6050 DMP Initialize Start ===
Checking I2C bus status...
Attempt 1 of DMP initialization...
[mpu_dmp_init] Starting I2C bus initialization...
[mpu_dmp_init] I2C initialization completed
[mpu_dmp_init] Starting MPU6050 initialization...
[mpu_init] Starting MPU6050 initialization...
[mpu_init] Resetting MPU6050 device...
[mpu_init] Reset successful
[mpu_init] Waking up MPU6050 chip...
[mpu_init] Wake up successful
[mpu_init] Checking product version...
[mpu_init] Product version check passed, version: 7
[mpu_init] Setting gyroscope full scale range(2000dps)...
[mpu_init] Setting accelerometer full scale range(2g)...
[mpu_init] Setting low pass filter(42Hz)...
[mpu_init] Setting sample rate(50Hz)...
[mpu_init] Configuring FIFO...
[mpu_init] Setting bypass mode...
[mpu_init] Disabling all sensors...
[mpu_init] MPU6050 basic initialization completed!
[mpu_dmp_init] MPU6050 basic initialization successful
[mpu_dmp_init] Setting sensors (gyroscope + accelerometer)...
[mpu_dmp_init] Sensor setup successful
[mpu_dmp_init] Configuring FIFO...
[mpu_dmp_init] FIFO configuration successful
[mpu_dmp_init] Setting sample rate (100Hz)...
[mpu_dmp_init] Sample rate setup successful
[mpu_dmp_init] Loading DMP firmware...
[mpu_dmp_init] DMP firmware loaded successfully
[mpu_dmp_init] Setting orientation matrix...
[mpu_dmp_init] Orientation matrix setup successful
[mpu_dmp_init] Enabling DMP features...
[mpu_dmp_init] DMP features enabled successfully
[mpu_dmp_init] Setting DMP FIFO rate...
[mpu_dmp_init] DMP FIFO rate setup successful
[mpu_dmp_init] Running self-test...
[mpu_dmp_init] Self-test failed, error code: 1
DMP initialization failed, error code: 8
错误: 未知错误
等待1秒后重试...
Attempt 2 of DMP initialization...
这里为了方便使用的是软件I2C,后面硬件I2C 等UP移植完会发出来。
https://wwp.lanzoul.com/itZun36m4rra
