
这是一篇简陋的教程,具体效果看我视频,本教程仅供大家讨论娱乐,如私自运用非法途径或行为,本人概不负责。
简单来说这是一篇组装教程,下载打印零件后根据步骤可以组装好,舵机控制教程网上有很多大佬以及出了优秀且完善的教程,我只会顺口提一下我遇到的坑,还请大家优先自己从网上找教程。
感兴趣的话可以加入我拉的一个各路技术交流群qq:724538156,群里也有打印文件,我也会上传到拓竹makerworld社区以及Thingiverse,欢迎大家讨论,需要solidworks源文件的朋友可以私信我(文件为2022版)。以下为组装教程:
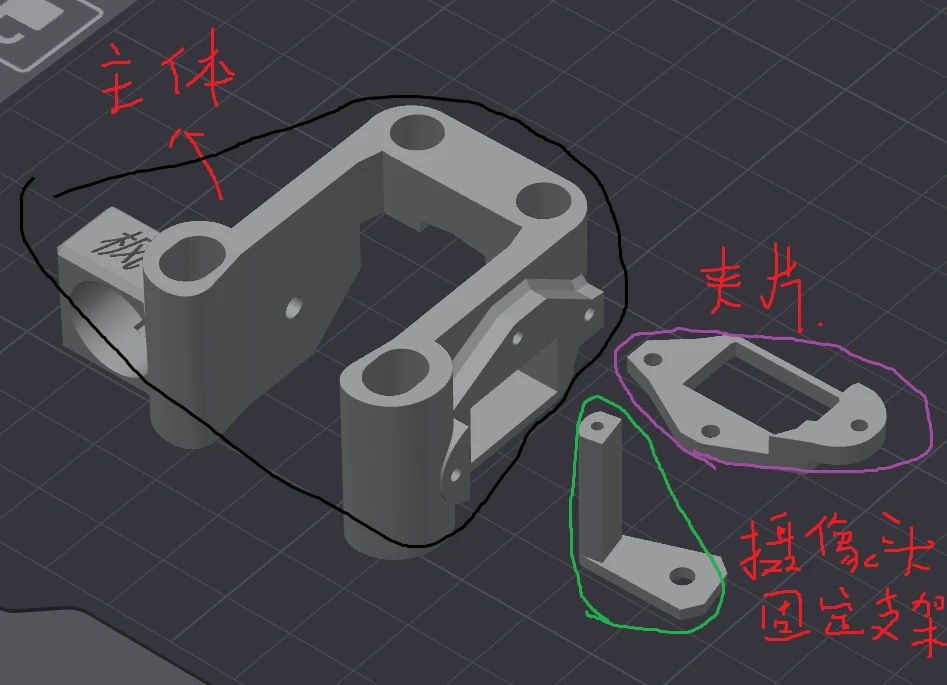
首先是全部零件预览
1,2g小舵机一个以及一个自带的舵机摇臂(要是舵机摇臂不一样就自己修改打洞)弹簧2-3mm直径,长度1cm就够了,选配,起一个减震,额外限位(可以剪刀裁剪)
2,用到m2螺丝,5mm一个,6-7mm四个(这些螺丝用其它长度也行,自己看实际情况。但是得是m2的)
3,以及10cm胶带,热熔胶一小坨,小金属棍一根直径1-2mm之间,长度2cm就够用(不浪费前提下),以下是打印件视图以及代称
4,需要打磨修剪底部网孔,这对强度影响不大,但是也有一点影响,自行斟酌考虑,up自己测试炸了那么多次是没啥问题的

下图是需要打印的零件,链接评论区置顶也有
首先是安装夹片和舵机摇臂,把固定支架和舵机摇臂与摄像头固定好,用热溶胶和一个5mm左右的m2螺丝如下图
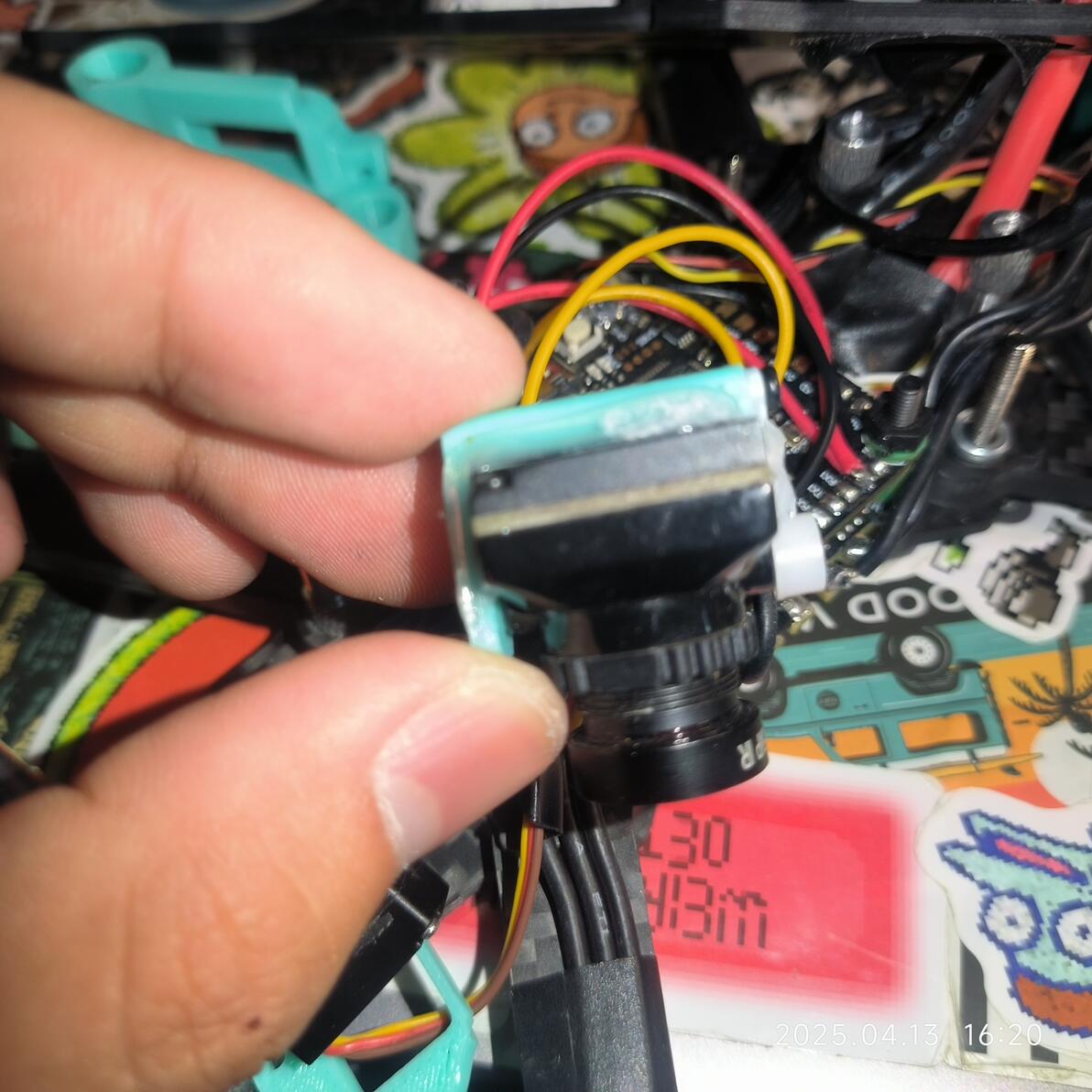
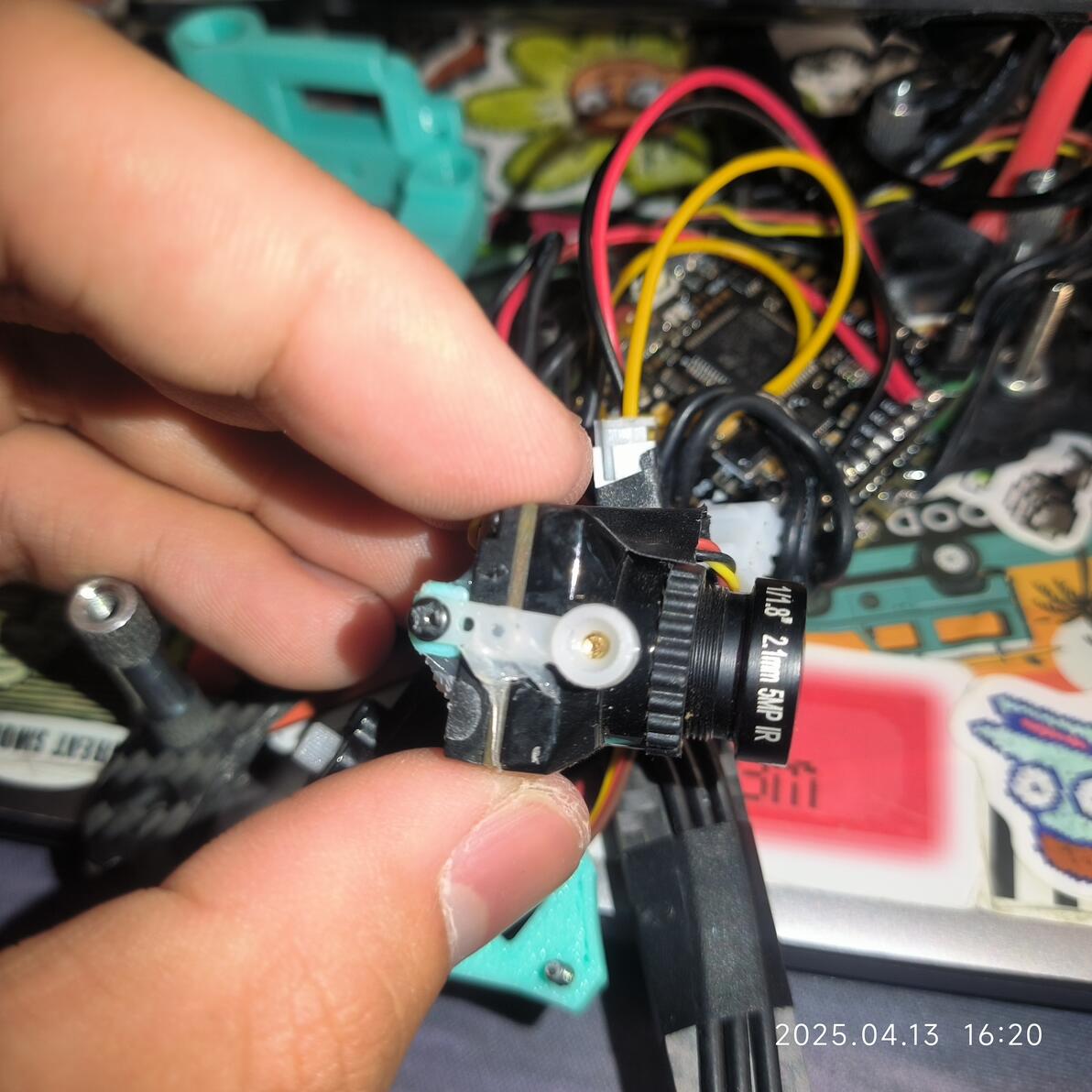
上面这张图可以看到支架和舵机摇臂与摄像头自带的m2螺丝孔位没有固定,而是依靠固定支架与舵机摇臂通过热熔胶粘合,后续会用细金属小棍插入做限位。
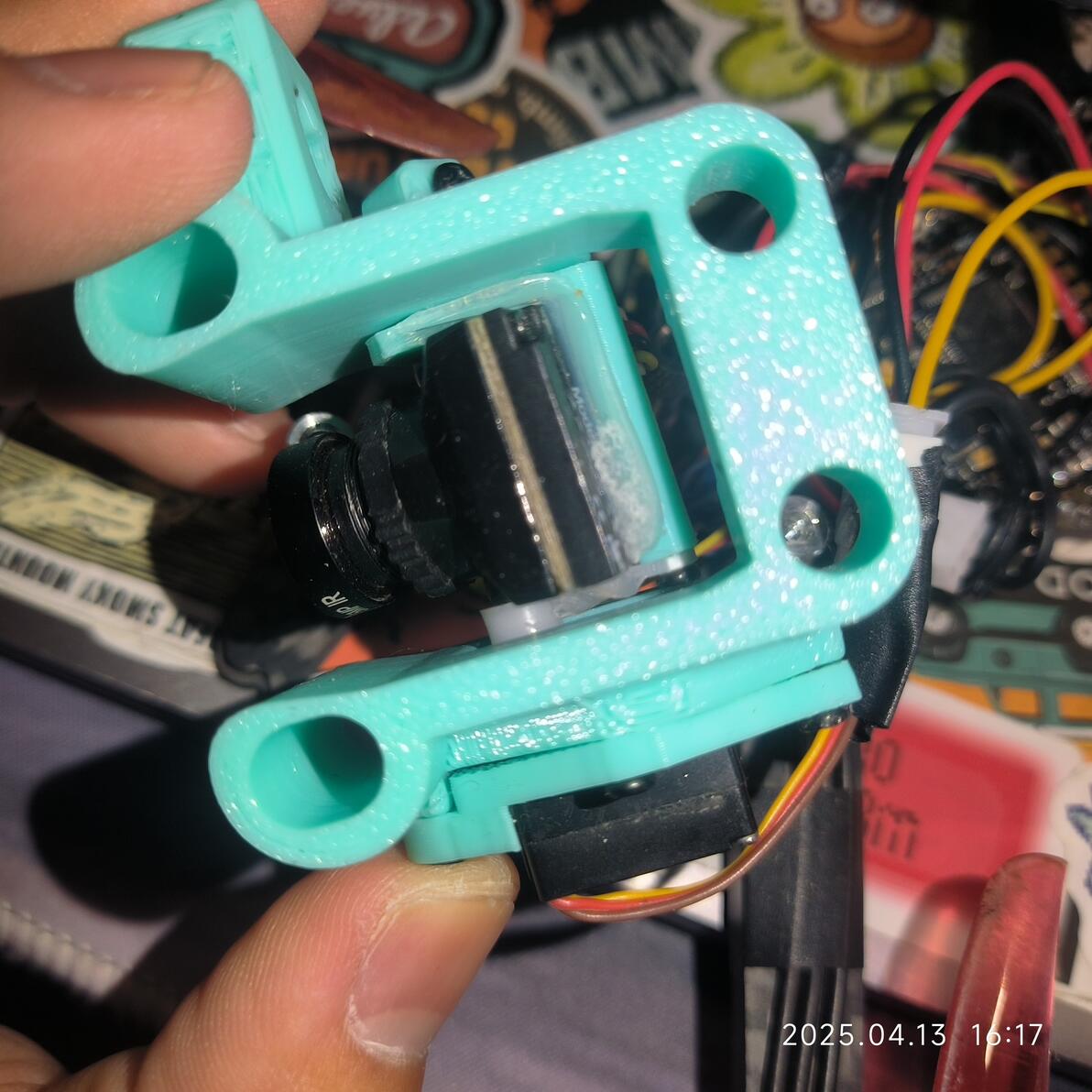
上面那张图是安装后的样子,注意,此时的摄像头数据线接口在下方,安装支架的时候注意这点,不然在整体转动的时候会很容易卡住数据线。
下面是处理主体支架部分,插入一根1.3mm直径左右的金属针,up猪是随便找了一个干净针头截断做的,具体长度在安装的时候自己把控,弹簧是为了减震,弹簧的直径在2mm差不多,也可以不加。
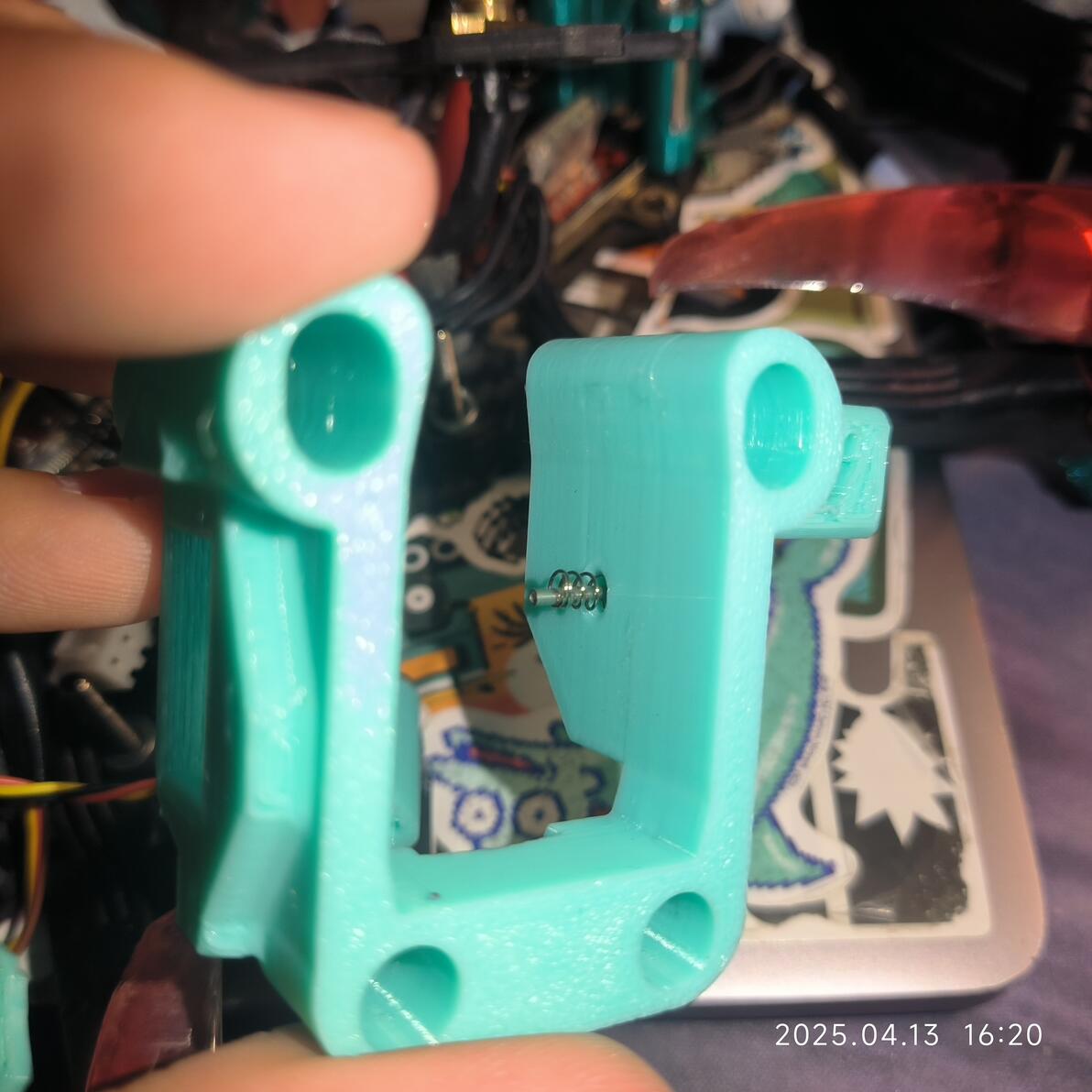
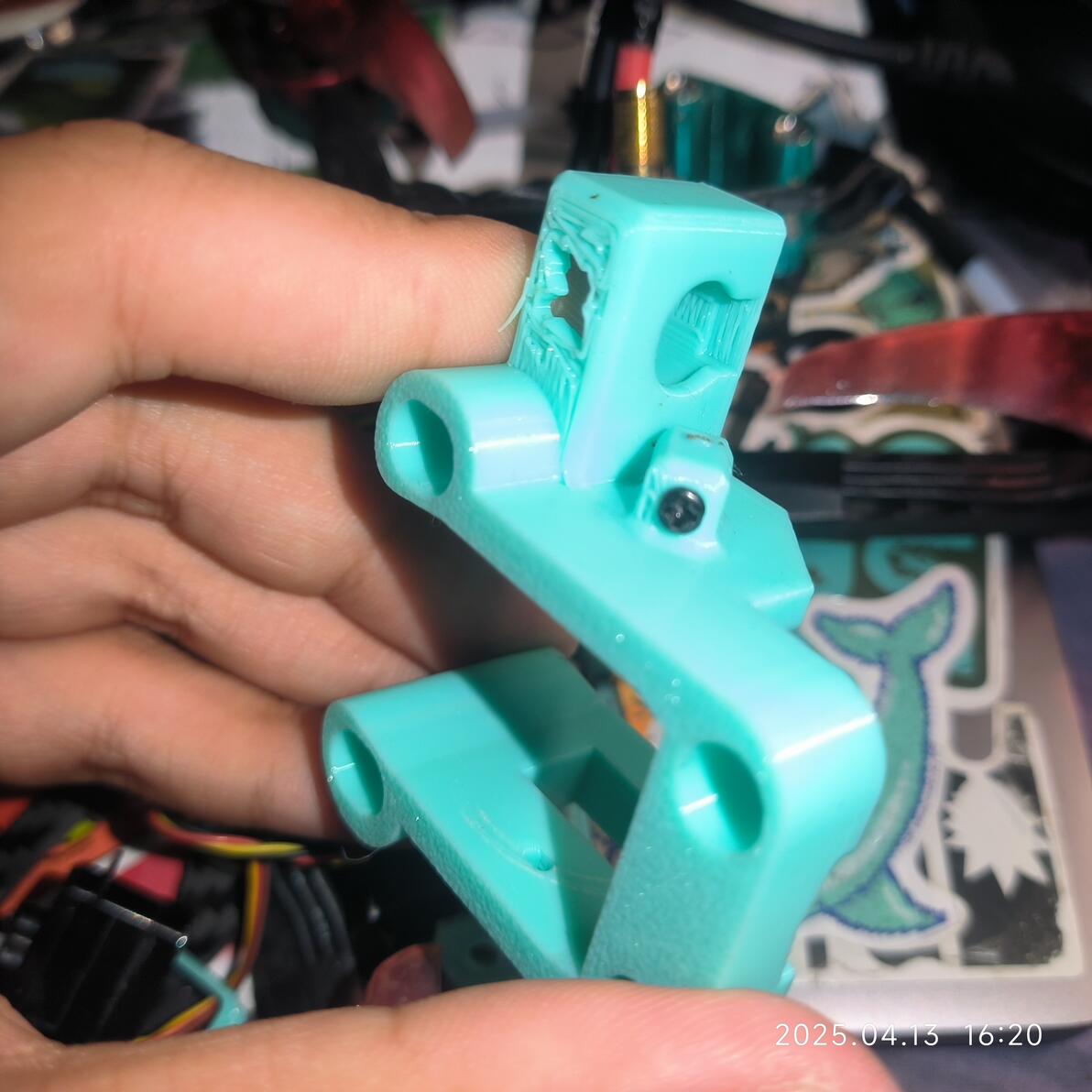
下图这个m2螺丝(长度7mm左右合适)是为了压紧那根金属细棍,摩擦固定
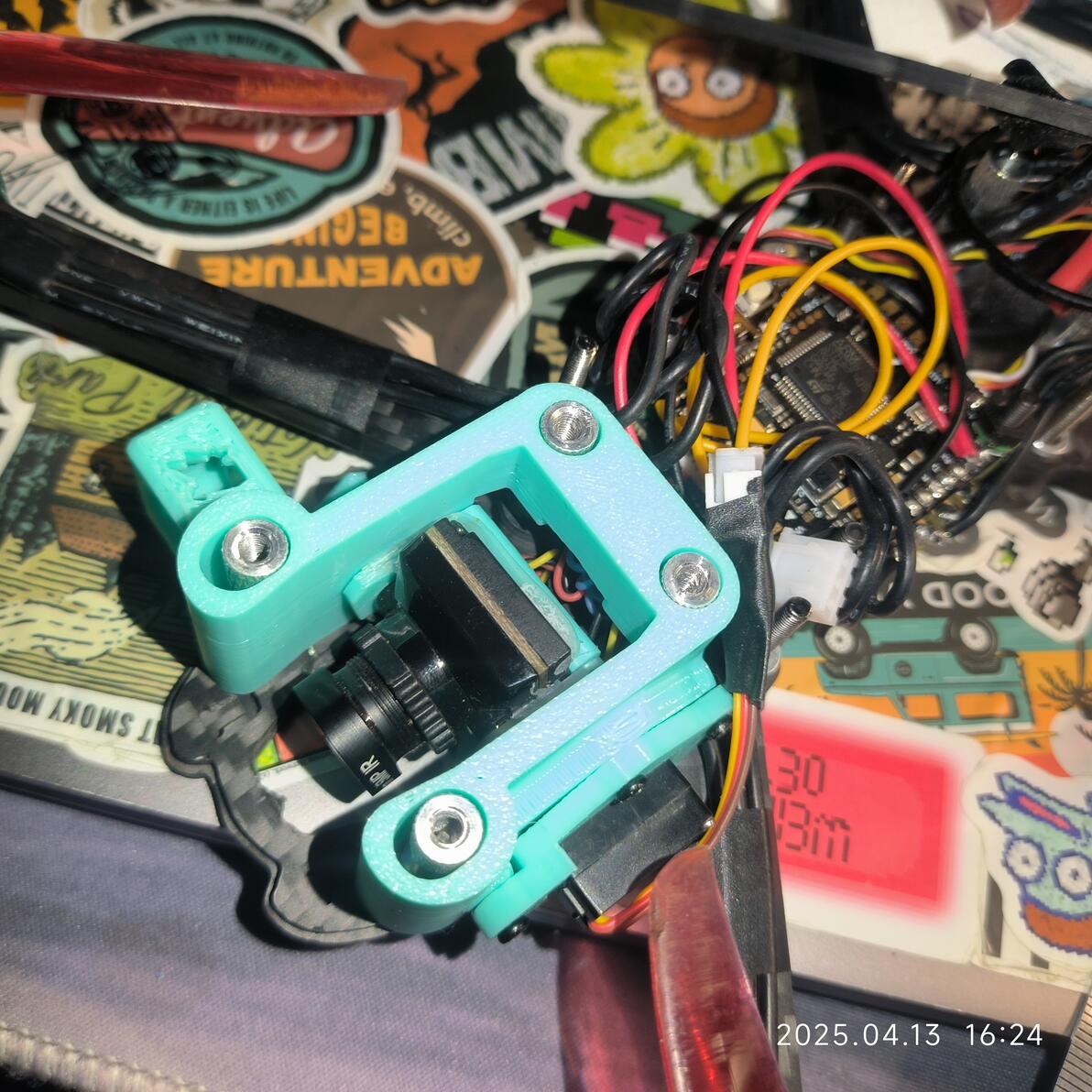
下图是把组装好的摄像头模块安放到位的情况,这个时候摄像头数据线还是随意游动的,可以边拿电工胶带,热熔胶或者醋酸胶带固定数据线,让它能随着摄像头转动同时不会被阻挡,对了,这一步就要开始调试舵机了,比如说3个位置,垂直地面,平视,高速视角(向上),调整摄像头和舵机连接,调整好后进入下一步

调整好后可以装入舵机,装上夹片,拧上3颗m2(长度5-6mm左右)
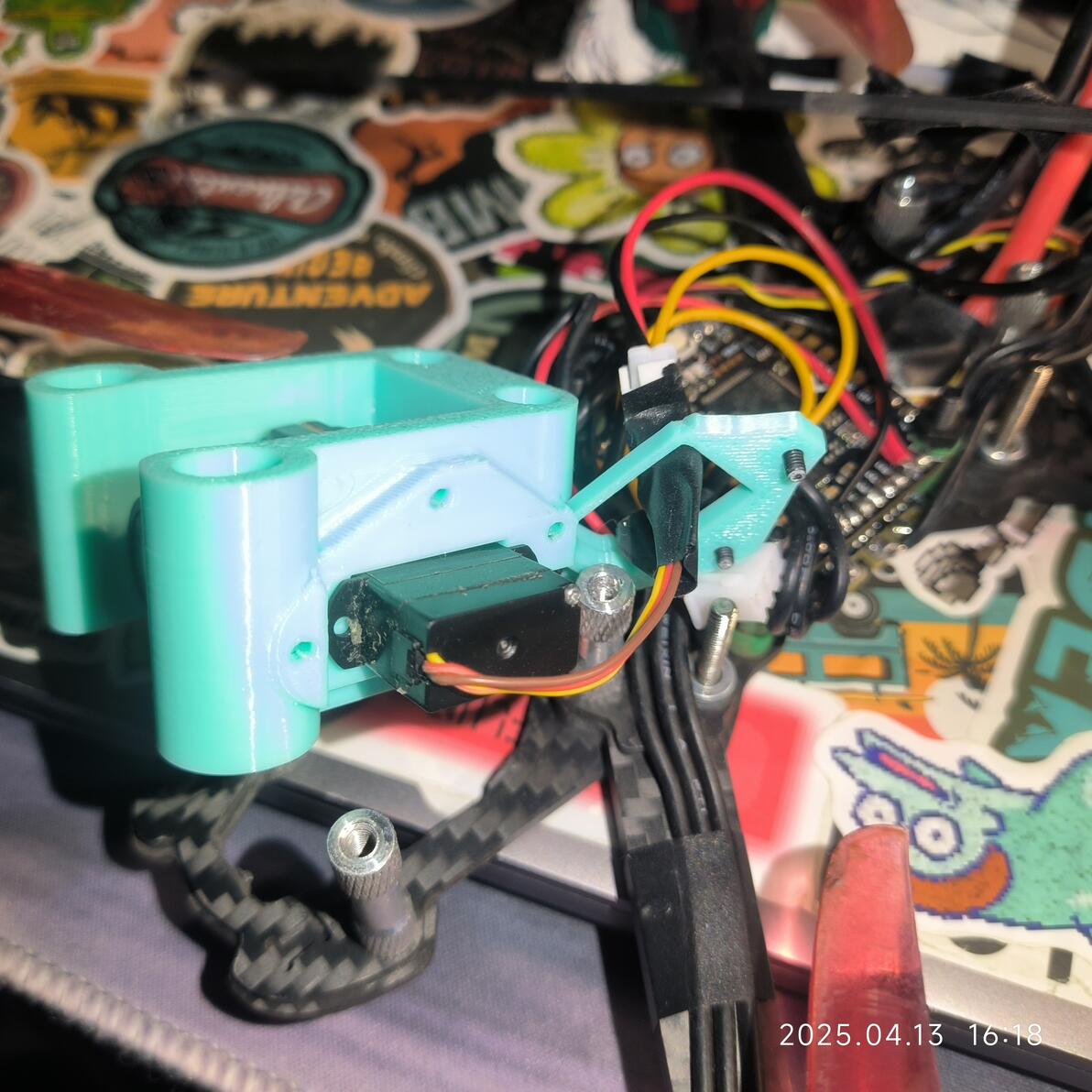
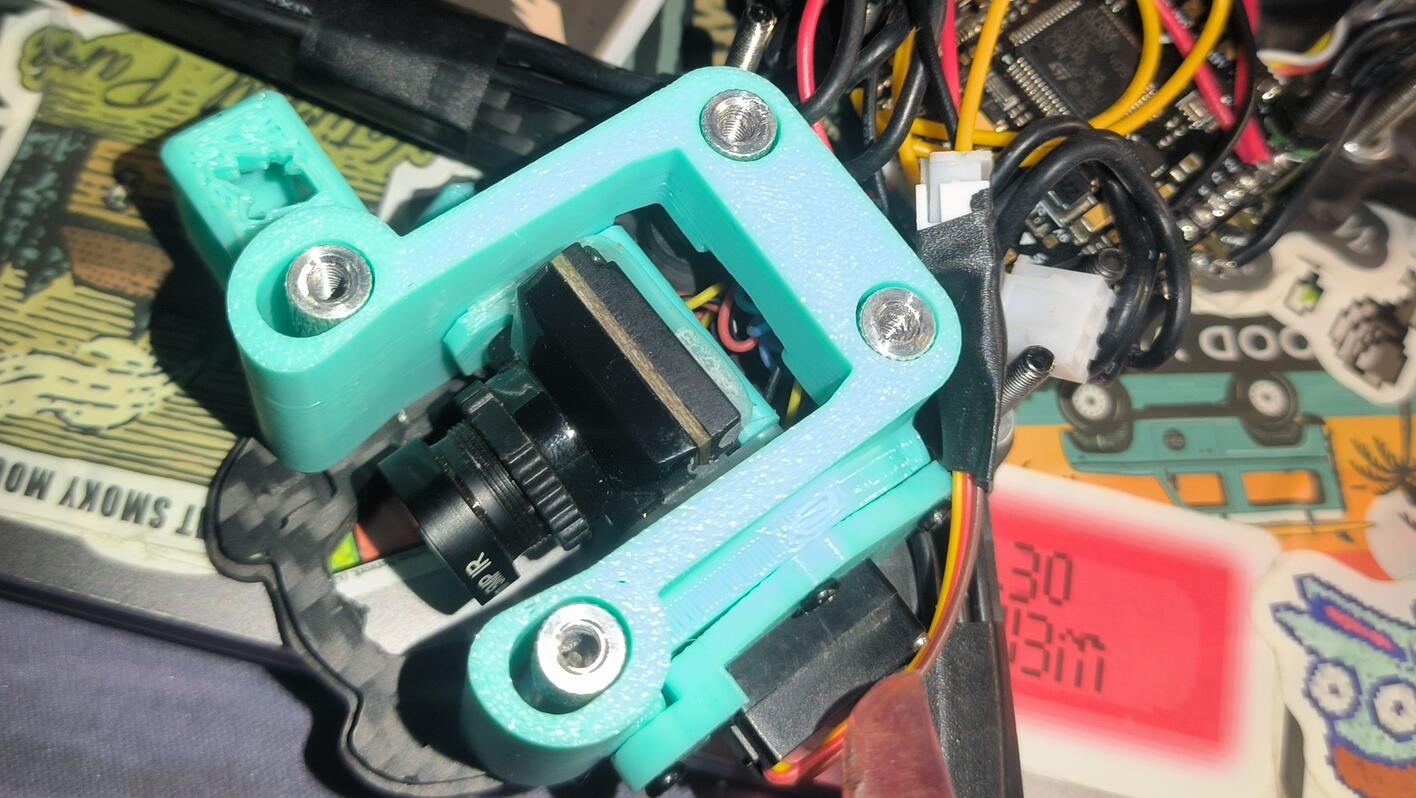
固定好之后可以按照螺柱位置装入机架,注意电线走线,机架裁剪过的地方也要用指甲刀或者锉刀打磨一下,碳纤维的细丝很尖锐,可能会划破硅胶电线外皮,可以用胶带沿着边缘贴一圈,防止划破。

装上后的效果,多进行测试,要求装动阻力小,不然对于2g舵机压力会比较大,长时间高负荷卡住,舵机会失去驱动能力,这点注意!!!
最后就是这个支架保留有一个蜂鸣器位置,安装可能有点挤但是用牙咬咬也是可以进去的,哈哈哈开玩笑的(虽然这个方法可行),用力压一下就进去了。
最后祝大家玩的愉快,欢迎评论区讨论,但是本人比较少看b站私信,欢迎加我
QQ1151979478一起交流玩耍
